My student is working on a multi-step structural simulation in ANSYS Mechanical and would appreciate your guidance on the recommended modeling strategy.
The objective is to simulate a two-stage process:
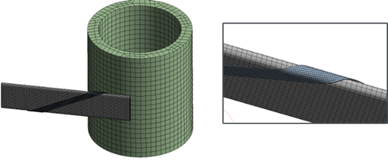
• Step 1: A very thin sheet (modeled via midsurface/shell representation) is wrapped around a straight core, producing a pre-loaded configuration.
• Step 2: The resulting wrapped geometry is then bent around a cylindrical support that is not present in Step 1.
We are attempting to use the Restart Analysis Add-On to transfer the final state of Step 1 into Step 2. The key modeling challenge is introducing the bending cylinder only during the second stage.
We explored element birth and death to activate the cylinder in later load steps, but this approach leads to convergence difficulties, including under-constrained model warnings and iteration limits.
Additionally, the model uses remote points (pilot nodes) to drive rotations and constraints across both steps, which further complicates the restart workflow.
From a best-practice standpoint, could you advise on:
The recommended way to introduce a body/contact interaction that is inactive in earlier steps but active in later steps within a restart framework?
Whether element birth/death is appropriate for this type of sequential forming/bending simulation, or if an alternative strategy (e.g., staged contacts, load stepping, multiple analyses, imported deformed geometry, etc.) is preferred?
Any known considerations when using Restart Analysis together with remote points and shell/midsurface models?
Do you suggest a different approach to do this model?