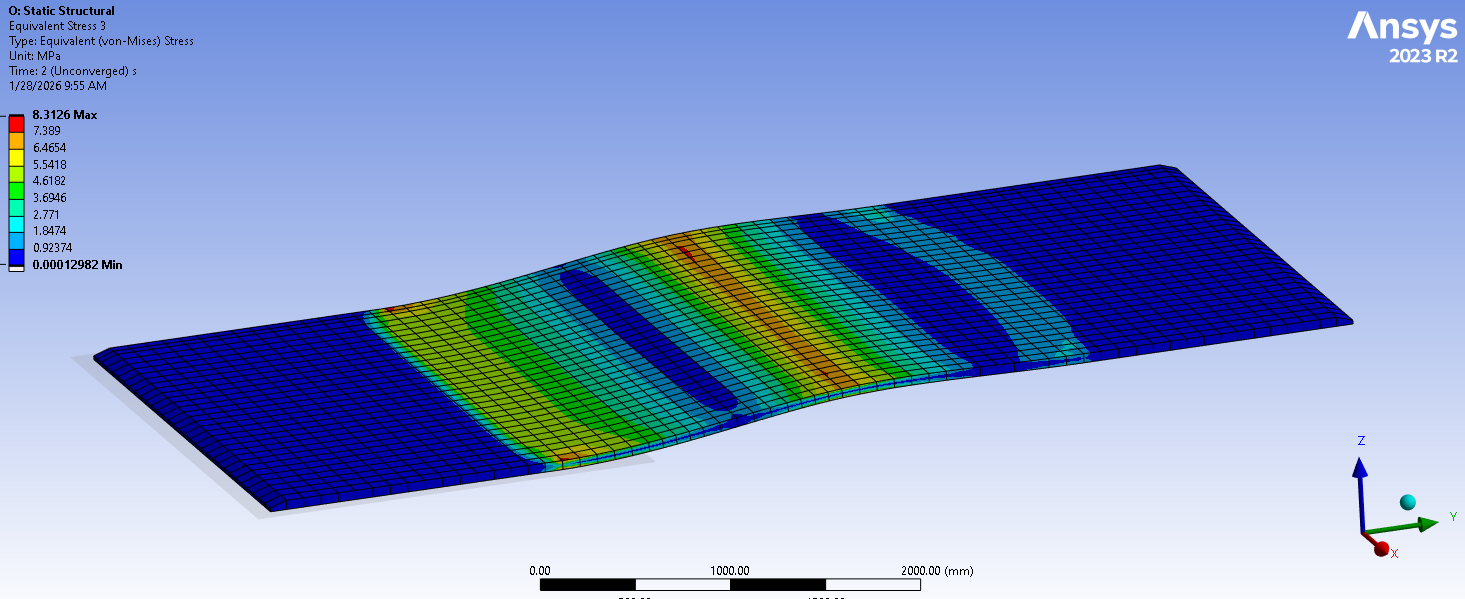
Good to see some progress.
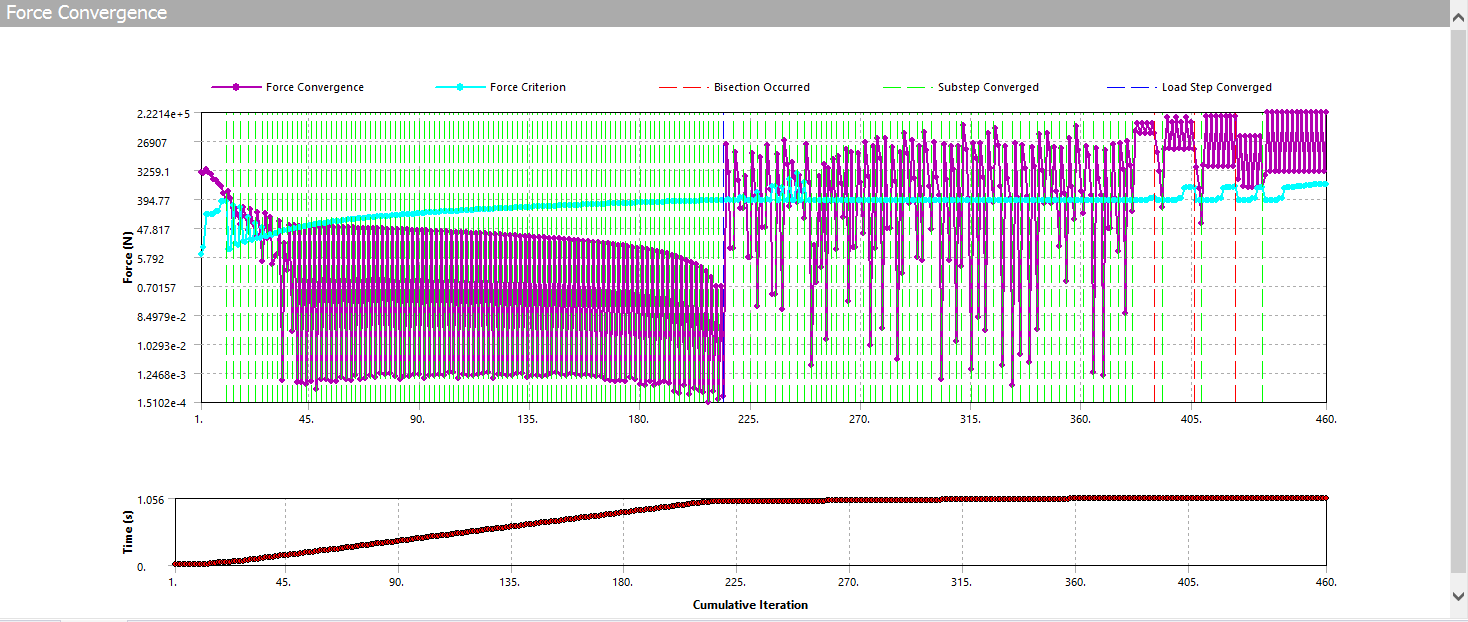
Next improvement would be to change the compression only support to a rigid surface so you can use frictional contact because friction helps to stablize the convergence and you have more control on the shape of the surface edge and the contact parameters as described below.
Add a 90 degree blended arc with a radius larger than the plate element size so that as the plate transitions from making contact with the level support faces to making contact with the edges of the faces as one support lowers, those edges are not a sharp edge but a generous radius so that several nodes are able to touch the tangent point of the radius. Making the element size smaller at the those edges and on the radius can help.
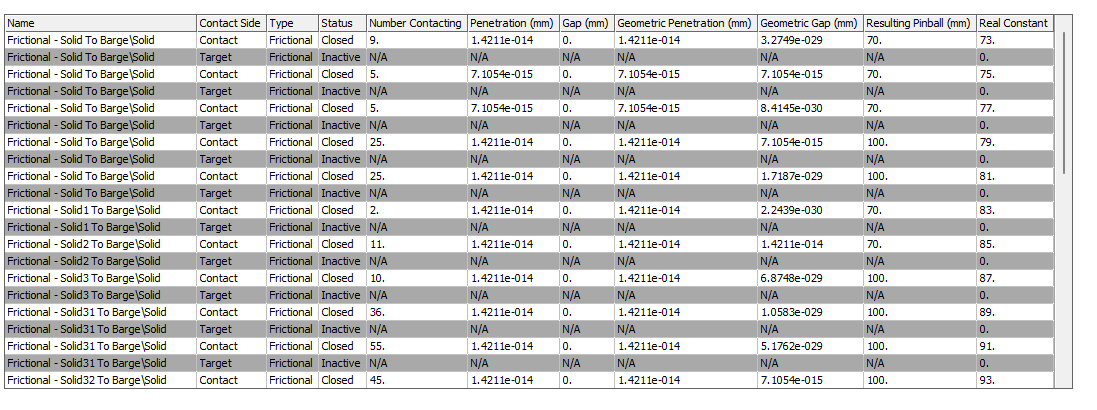
Change the Frictional contacts at each support by changing the Normal Stiffness Factor and use a number like 0.1 or 0.01 or 0.001. As the number gets smaller, the more plate nodes will make contact with the blend radius at the edges of the support, but the nodes will penetrate more, so only use a factor small enough to help convergence without getting excessive penetration.