Hi all,
I'm running a 3D static structural analysis of a ball screw assembly in ANSYS Workbench 2023 (shaft, balls, and nut). My goal is to simulate realistic mechanical coupling — i.e., when the nut rotates, the shaft should move axially in the correct direction (and vice versa).
Setup:
Frictional 4-point contact between balls and grooves (nut and shaft).
Nut = cylindrical support (allows rotation about axis).
Shaft = cylindrical support (allows axial movement only).
Asymmetric contact: balls = contact, grooves = target.
Frictional contact with small sliding off; offset ~0.022 mm; pinball ~0.2 mm.
Large deflection ON; weak springs OFF.
Time stepping: auto (20 initial, 10 min, 50 max).
Solver: direct.
Problem:
When I apply a remote axial displacement to the shaft, the nut rotates in the expected direction (e.g., shaft +X → nut −θ).
However, when I apply a rotation to the nut, the shaft moves in the same axial direction regardless of rotation direction, which is not physical. I expect reversed shaft motion for reversed nut rotation.
Has anyone experienced this? Is this likely due to contact stiffness, friction behavior, or boundary condition setup? Any advice or similar cases would be greatly appreciated.
Thanks in advance!
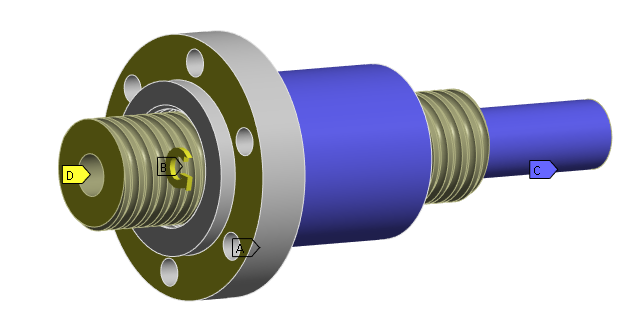
P.S.: Please ignore the remote displacement "D" in the picture. It was from another simulation.