Hi, Thank you for the interest.
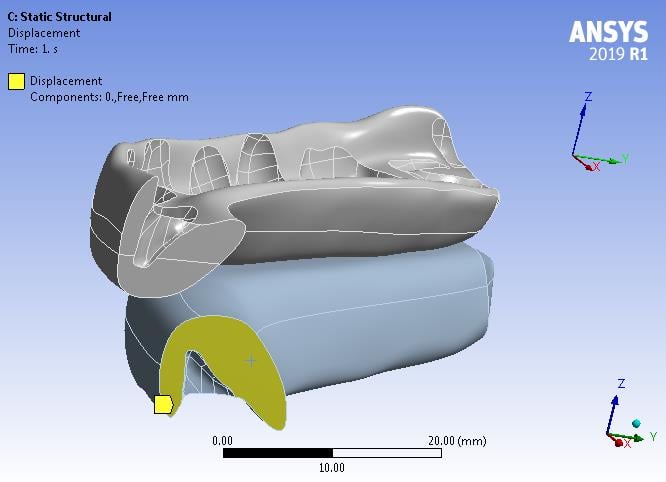
-This is a side view
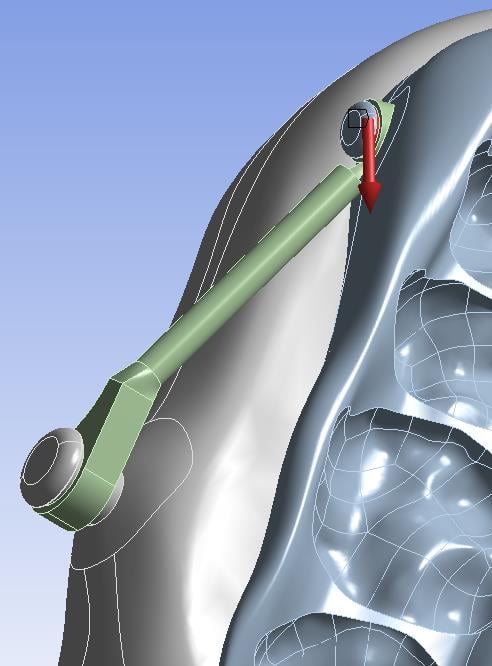
-The force is applied with a tilted direction because of its Y and Z components (Y is horizontal and positive to the left, Z is vertical and positive upwards)
-there is clearance of about 0.25 mm between the pin and the inner face of the orange circle because the real model is made in this way (there is no bushing, only the pin and the circle)
- I set frictionless contact between the outer face of the pin and the inner face of the orange circlle with a pinball equal to the clearance between them
- there is no gravity force acting on the system
- the picture is a 2D representation, but the model is 3D. The lower block is unconstrained in the space but I hope that through the orange connector once I apply the force it is able to move until touching (without penetration) the upper block thus getting the stress.
- I appllied frictionless between the bottom face of upper block and top face of lower block so that the contact is set from the beginning resulting near open.
- I've also thought about assembling the two blocks in the final configurations, but they are nonplanar thus one part couls penetrate the other in some regions so I prefer to apply the force until the lower block touches in one point the upper one in order to transmit the force
- If the problem is due to the lower block can I create a two step simulation in order to create the movement of lower body until touching the upper one in the first step and then apply the force in the second step when since they touch from that moment?
Thank you!