Hello Sillus,
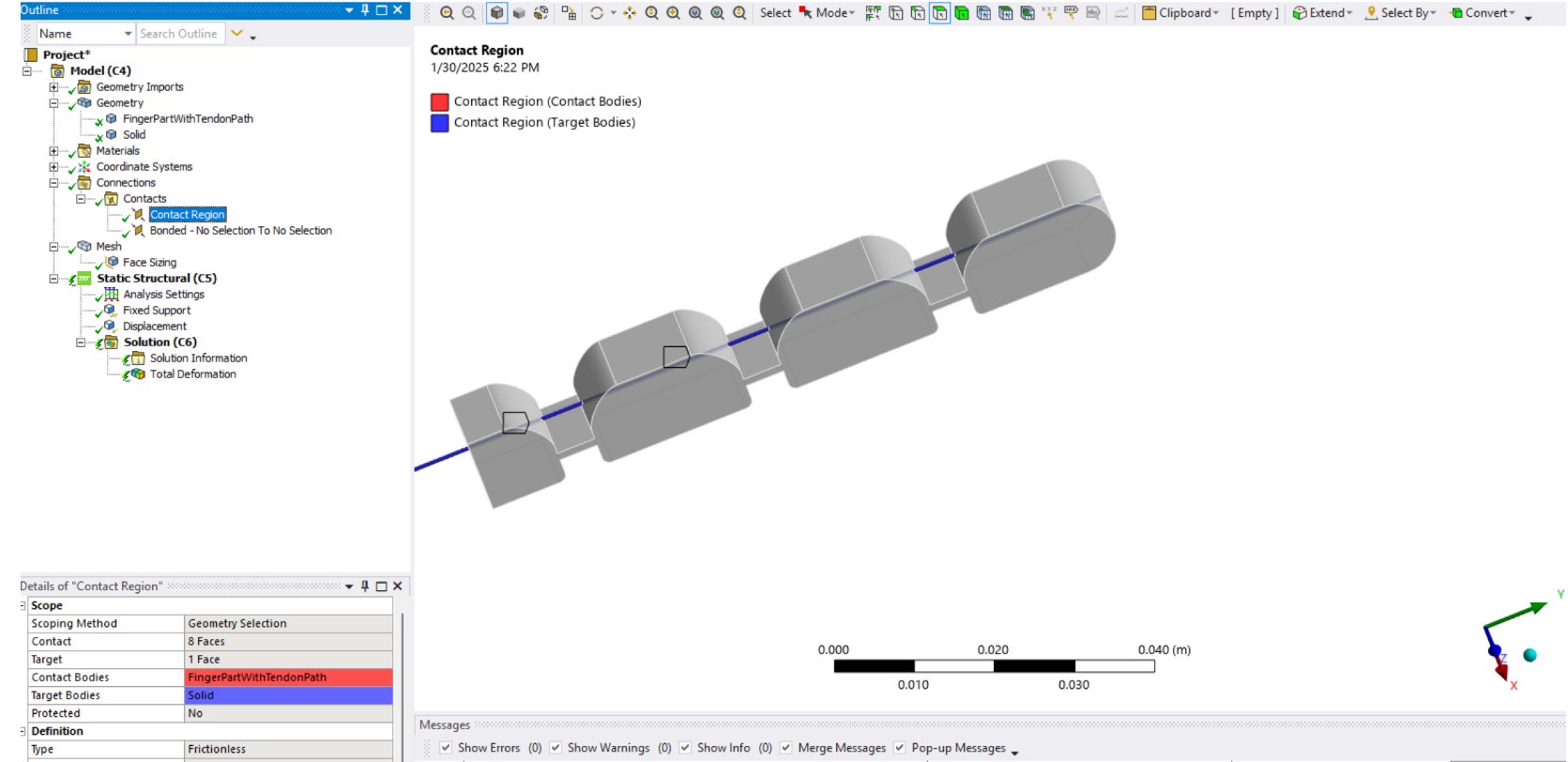
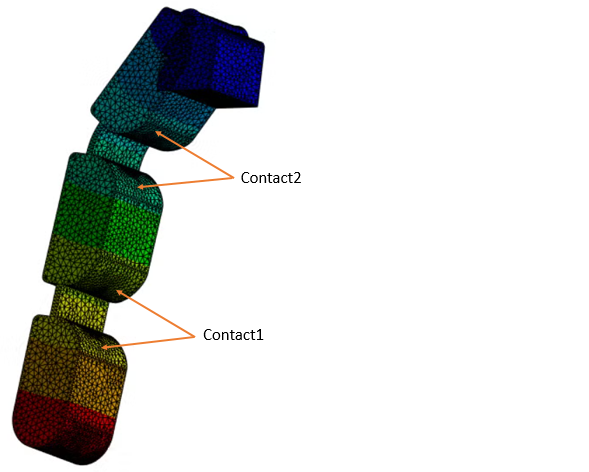
I suggest you add three frictional contacts. The third one has two faces near the first hinge. You don’t need a multibody part for this contact to work.
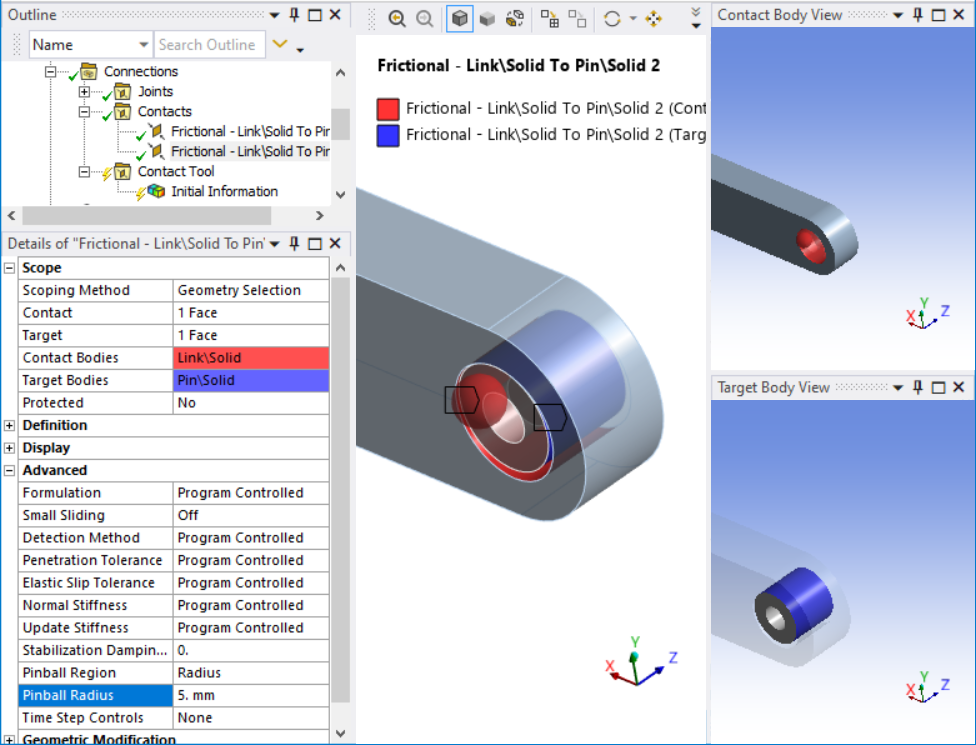
On each contact definition, set the Pinball Region to Radius and type in a number so that the transparent red ball passes through both surfaces you picked.
Under the Contact folder, insert a Contact Tool and right click to Generate Initial Contact Results. Look at the results to confirm that the Contact Status is Near Open. That means the contact algorithm will monitor the surface pairs as they approach each other and will prevent penetration. If the Contact Statis is Far Open, the contact will be ignored and penetration will occur.
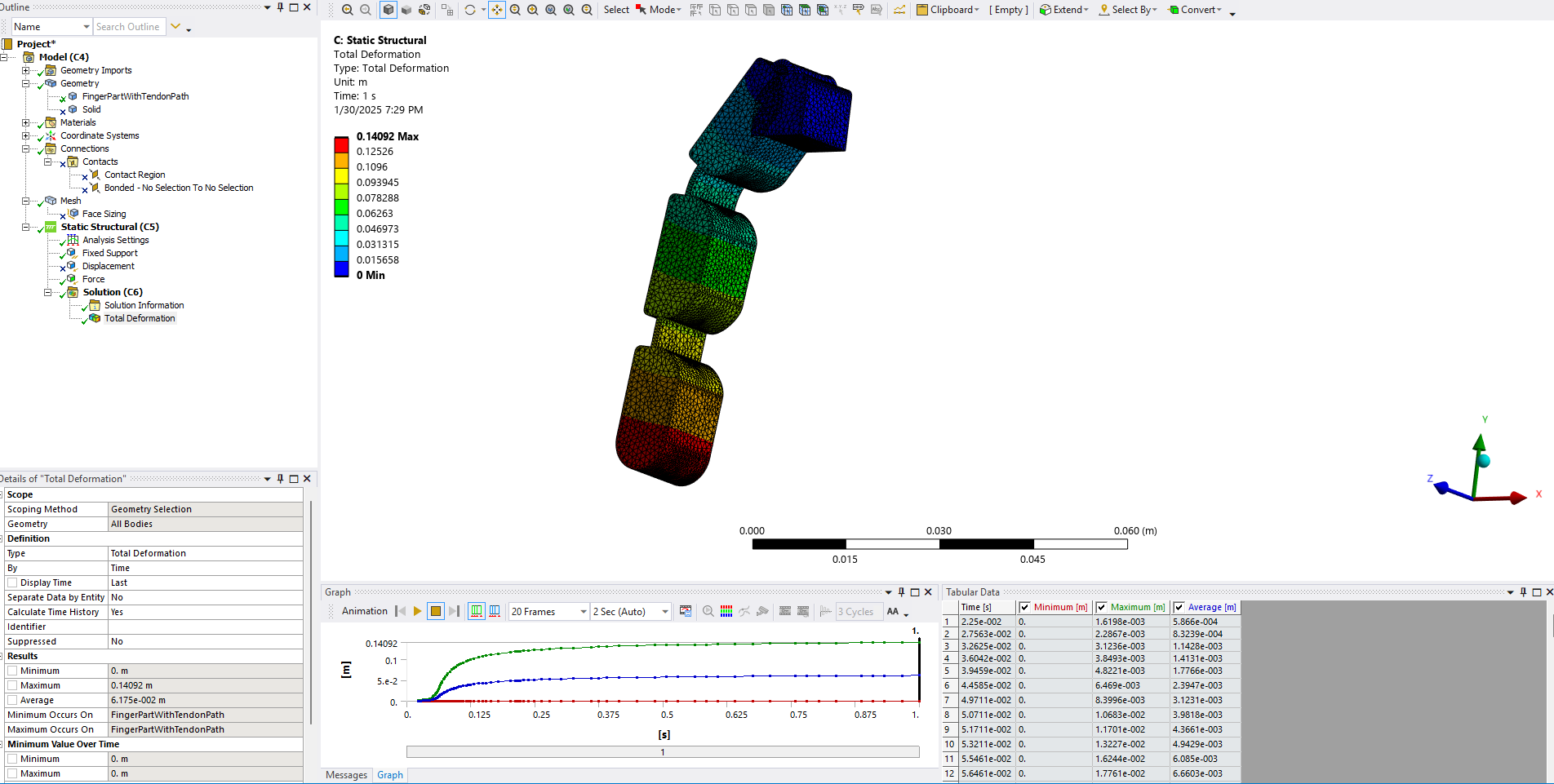
I have worked on some cable-driven finger models and can tell you that applying a force to the tip of the finger results in a very different deformation than the tension in a cable passing through each link on the finger.
https://innovationspace.ansys.com/forum/forums/topic/analysis-of-robotic-finger/