Hello Ahmet,
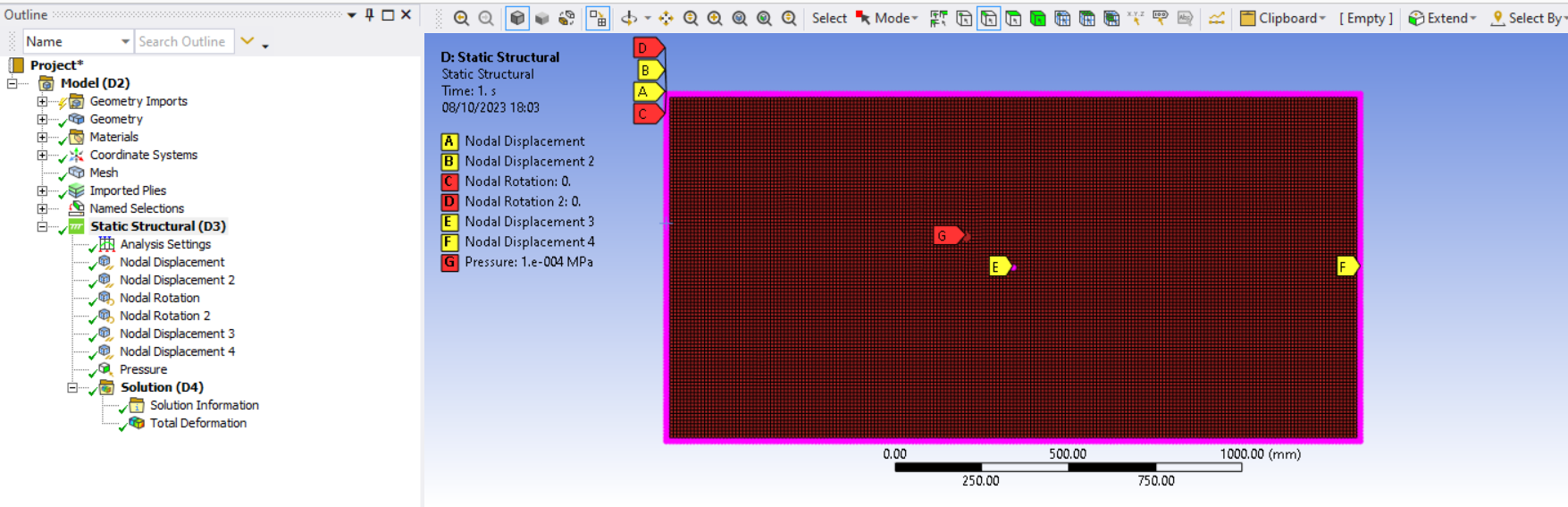
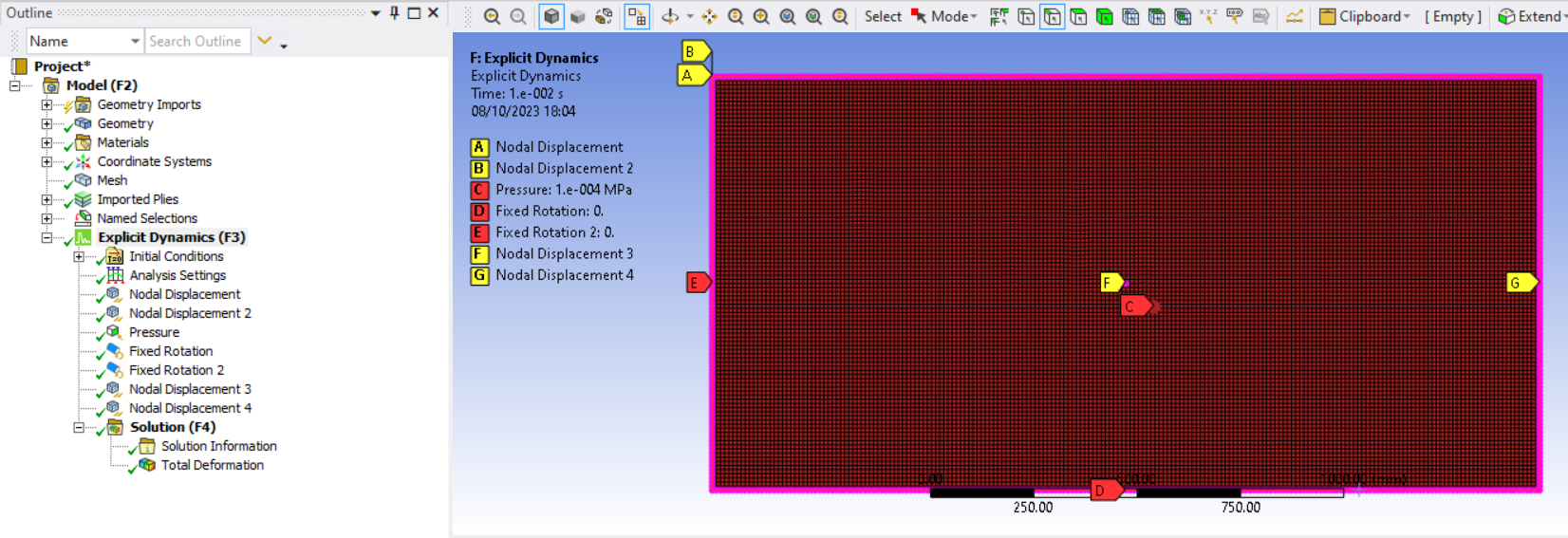
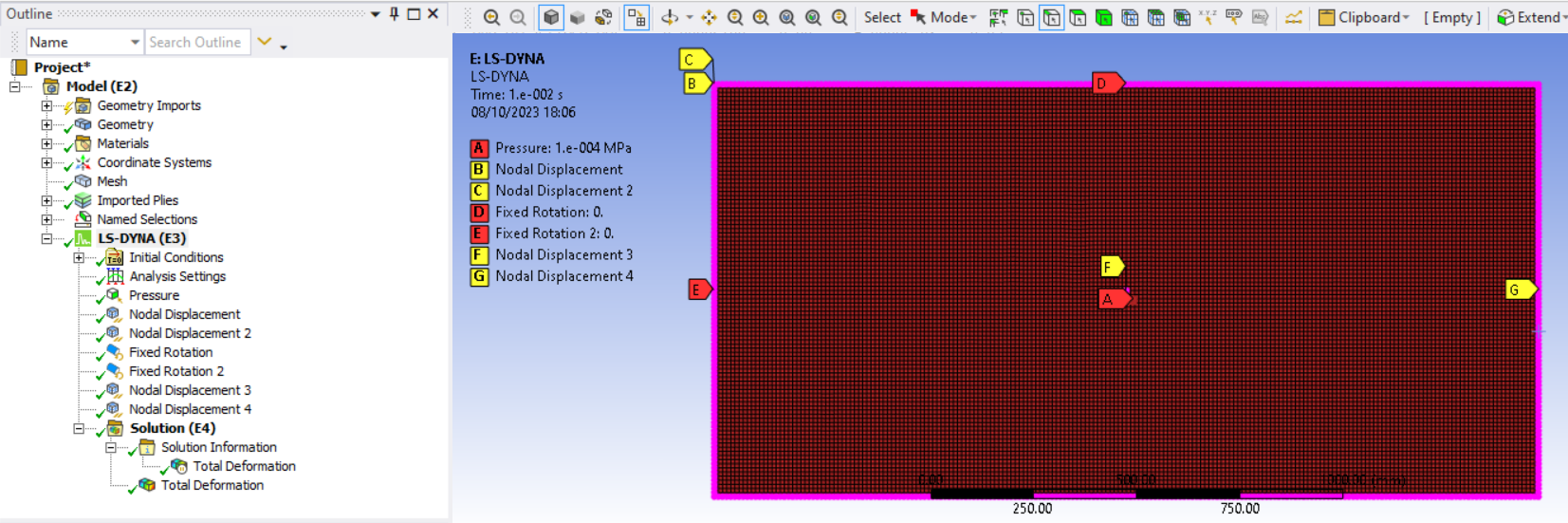
If the boundary conditions are not the same, you will get different results. Have you tried to fix the rotations in Static Structural as well? What result do you get?
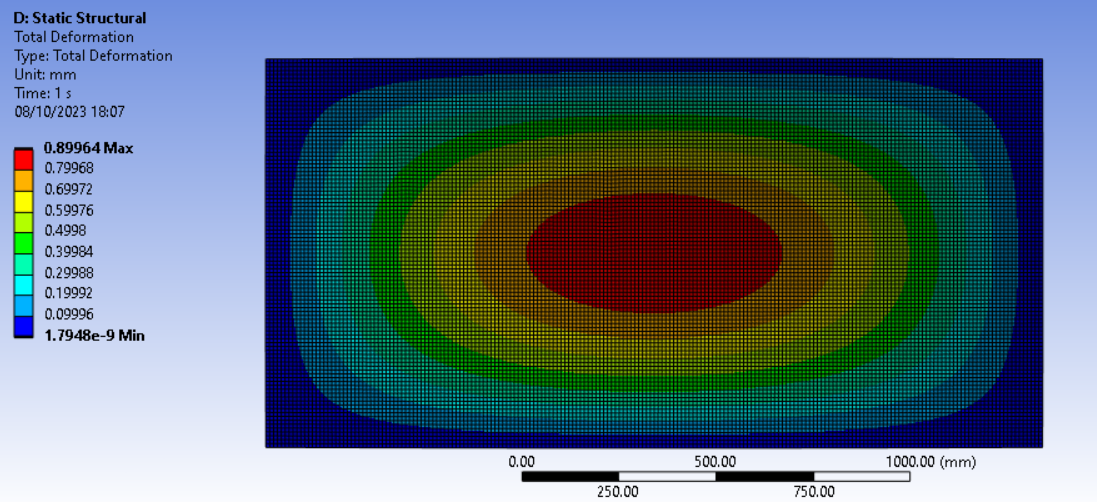
Also, implicit and explicit are different simulations and results are often different. In implicit, you calculate the static equilibrium position and do not consider the inertial effects (F=ma). In implicit, the time at the end of the simulation is not important (the default is 1 second, but you could use 100s and get the same result).
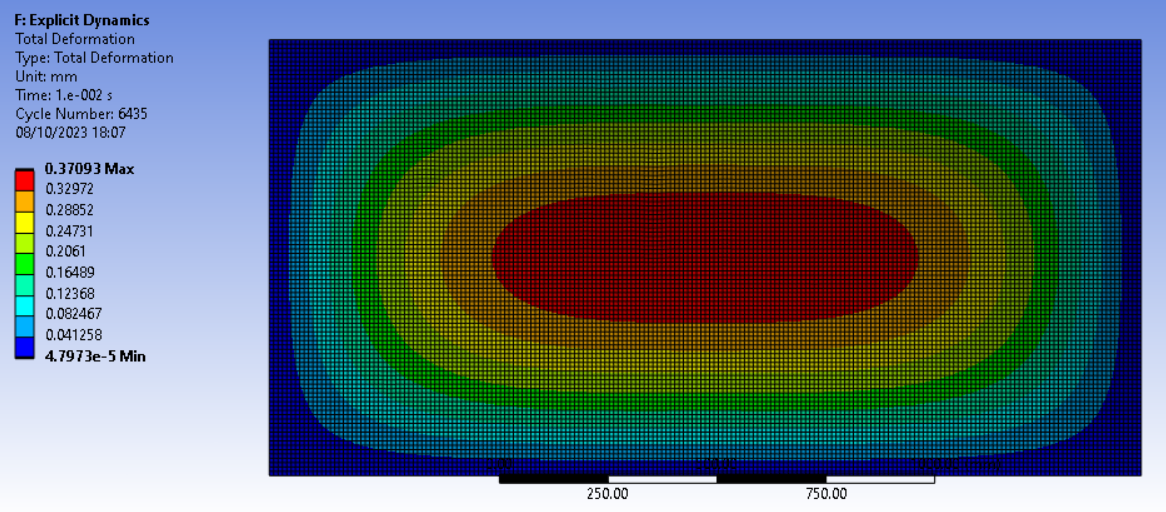
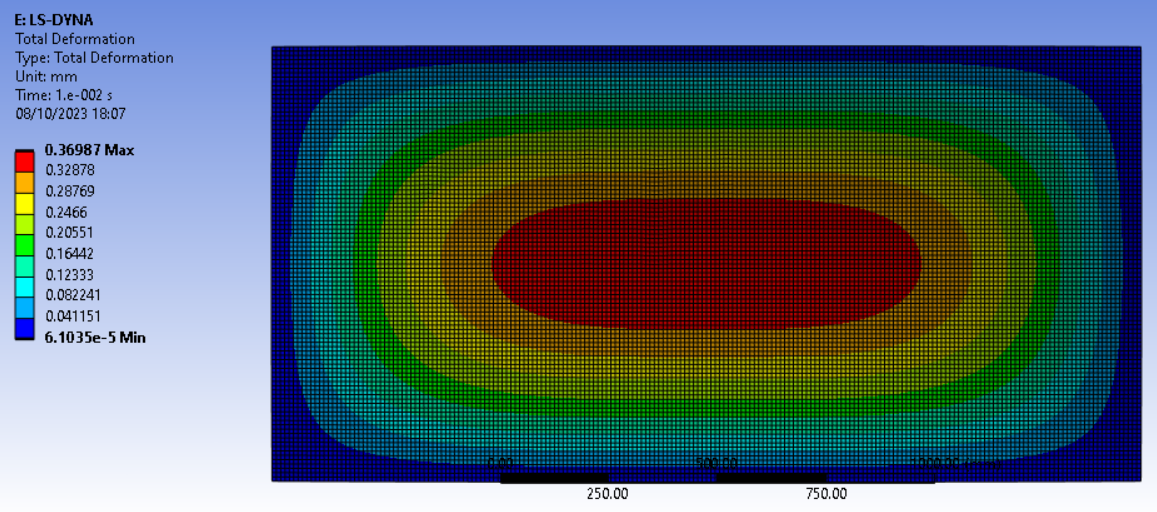
In explicit, the inertial effects (F=ma) are taken into account and time matters. If you apply the load at different speeds you will get different results. Also, if the part is fully constrained and there is no rigid body motion, then the deformation solution will vibrate around the equilibrium position in time. If you have damping, the solution should eventually settle a the equilibrium position.
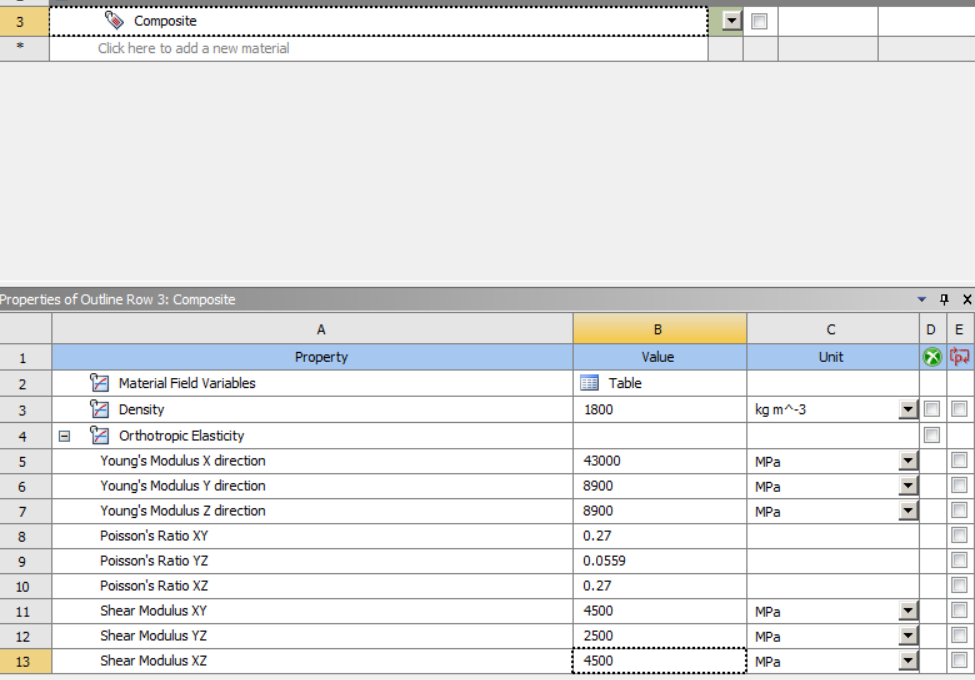
If you wonder if the composite information is transferred properly in explicit, please try to run the same model with the default "Structural Steel" material in Workbench. Remove the composite layup and compare the results. I bet the results will still be different in implicit vs explicit because the boundary conditions are not the same.
You will find more information about implicit vs explicit here:
/courses/index.php/courses/time_integration/
Let me know how it goes.
Reno.