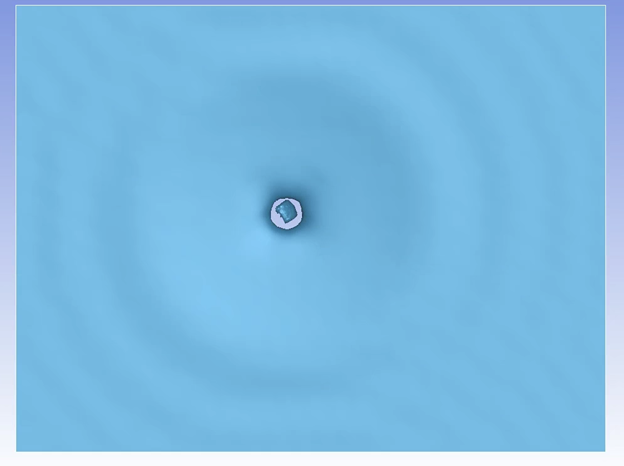
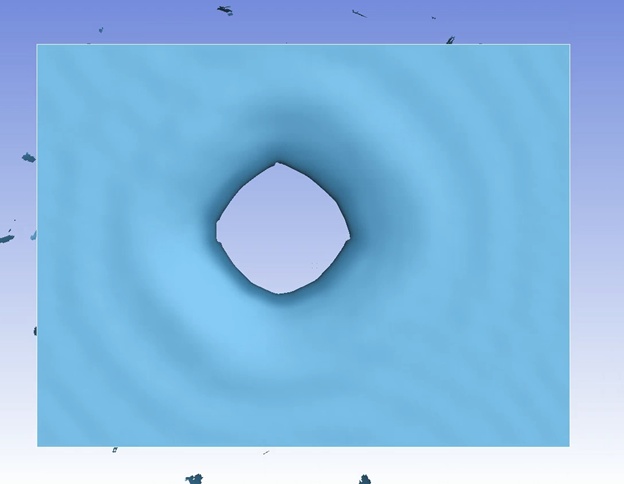
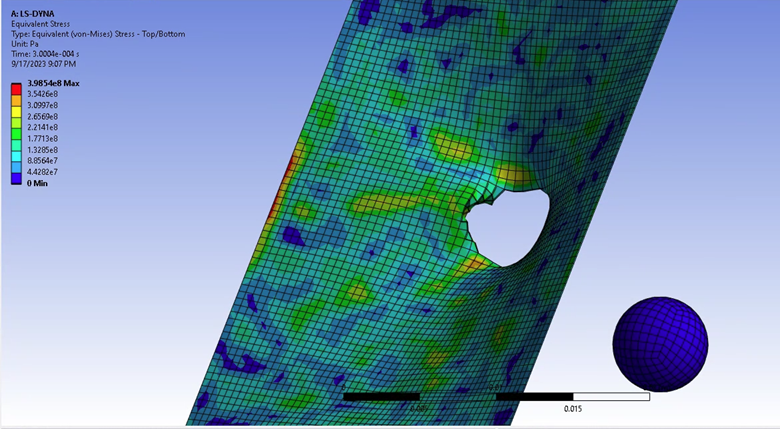
I have a simple ball impacting a plate (with some added erosion to simulate a perforation). At a medium sized mesh I get expected results
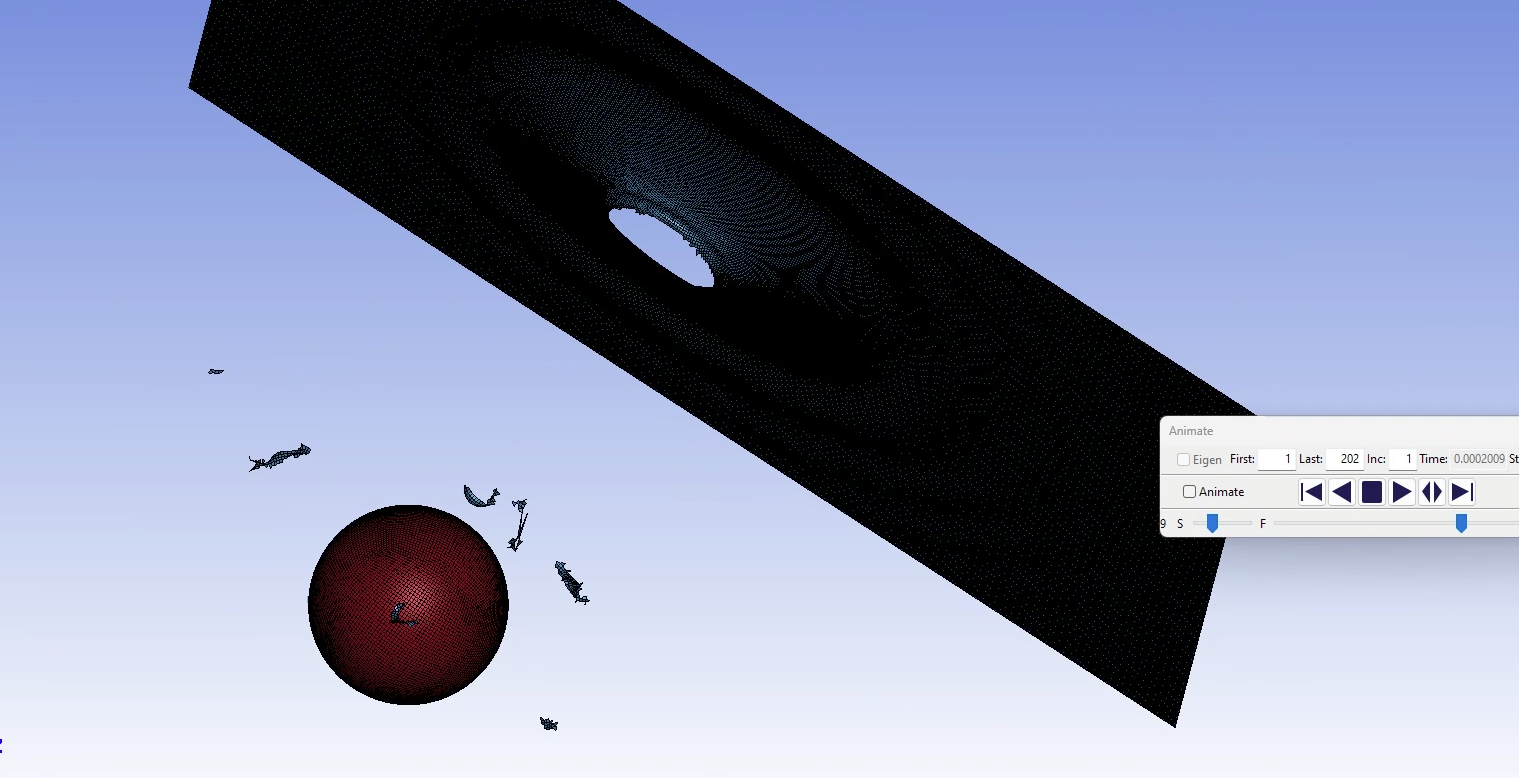
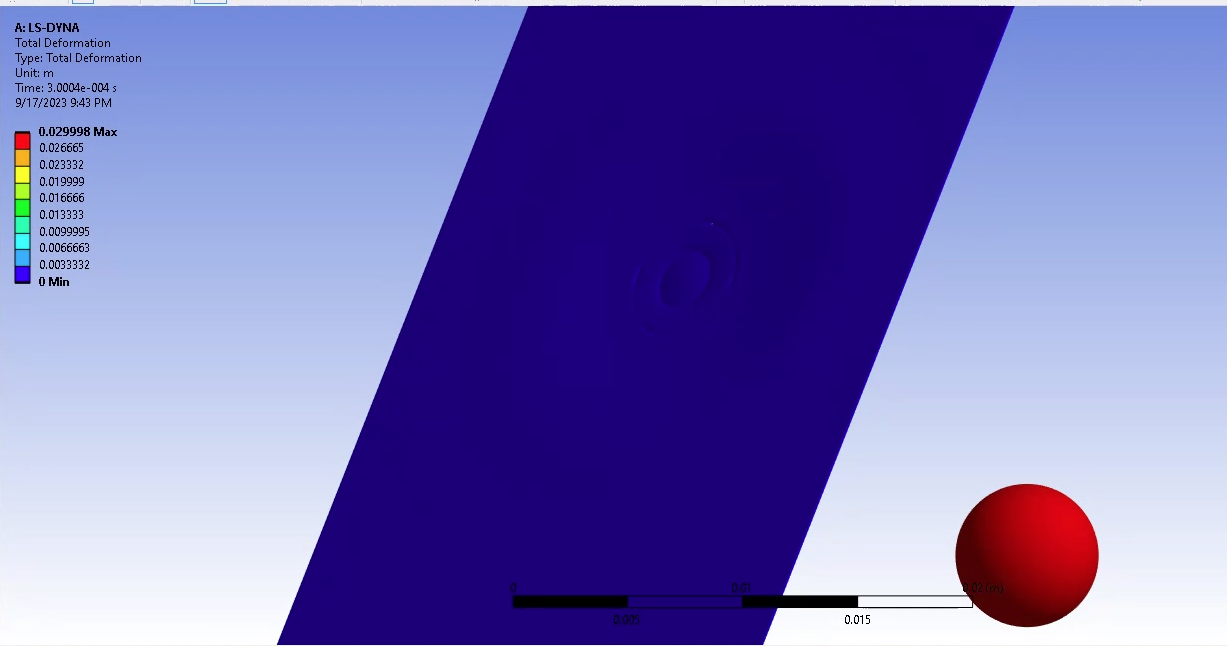
For the much finer mesh (below; mesh hidden since it is too fine). The ball seems to dimple the surface but then just ghosts right through the plate. Nothing was changed in the problem setup except for mesh size.
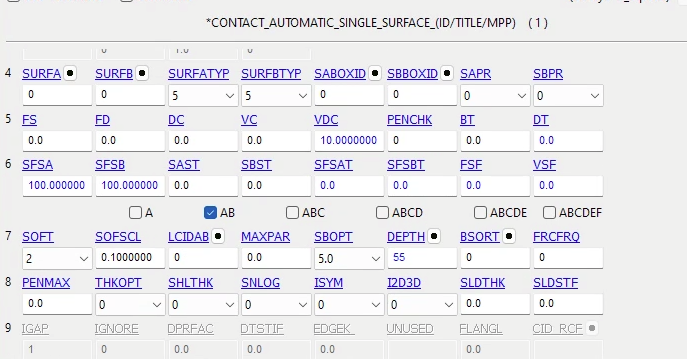
I am using AUTOMATIC_SINGLE_SURFACE with SOFT = 1 but this happened with SOFT = 2, also. Presumably this is something to do with the contact stiffness, since all formulations SOFT=0,1,2 have contact stiffness dependent on either the mesh size or the timestep (via, in part, the mesh size). I would have thought this would be handled more robustly for such a simple problem then have to manually tweak contact scale factors...
Perhaps there is an atlernative contact scheme that is more robust? If not, how do I know how much contact stiffness to add to get the same results as the coarse mesh. It is very counter intuitive that a coarse mesh produces better results in this case.