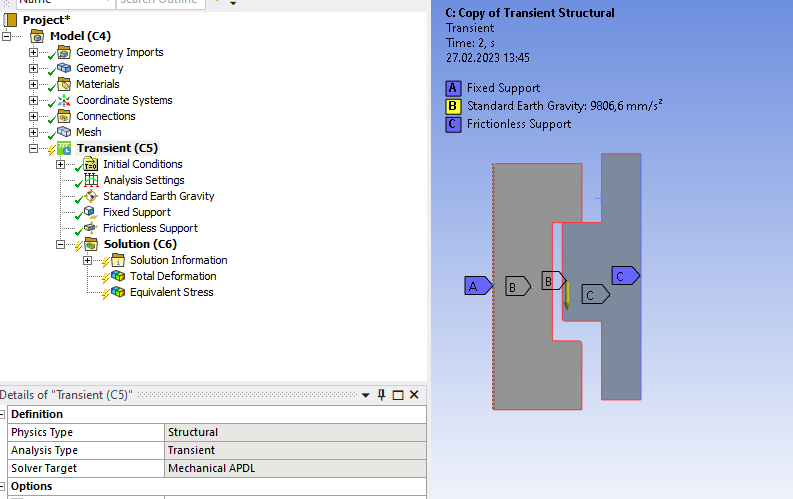
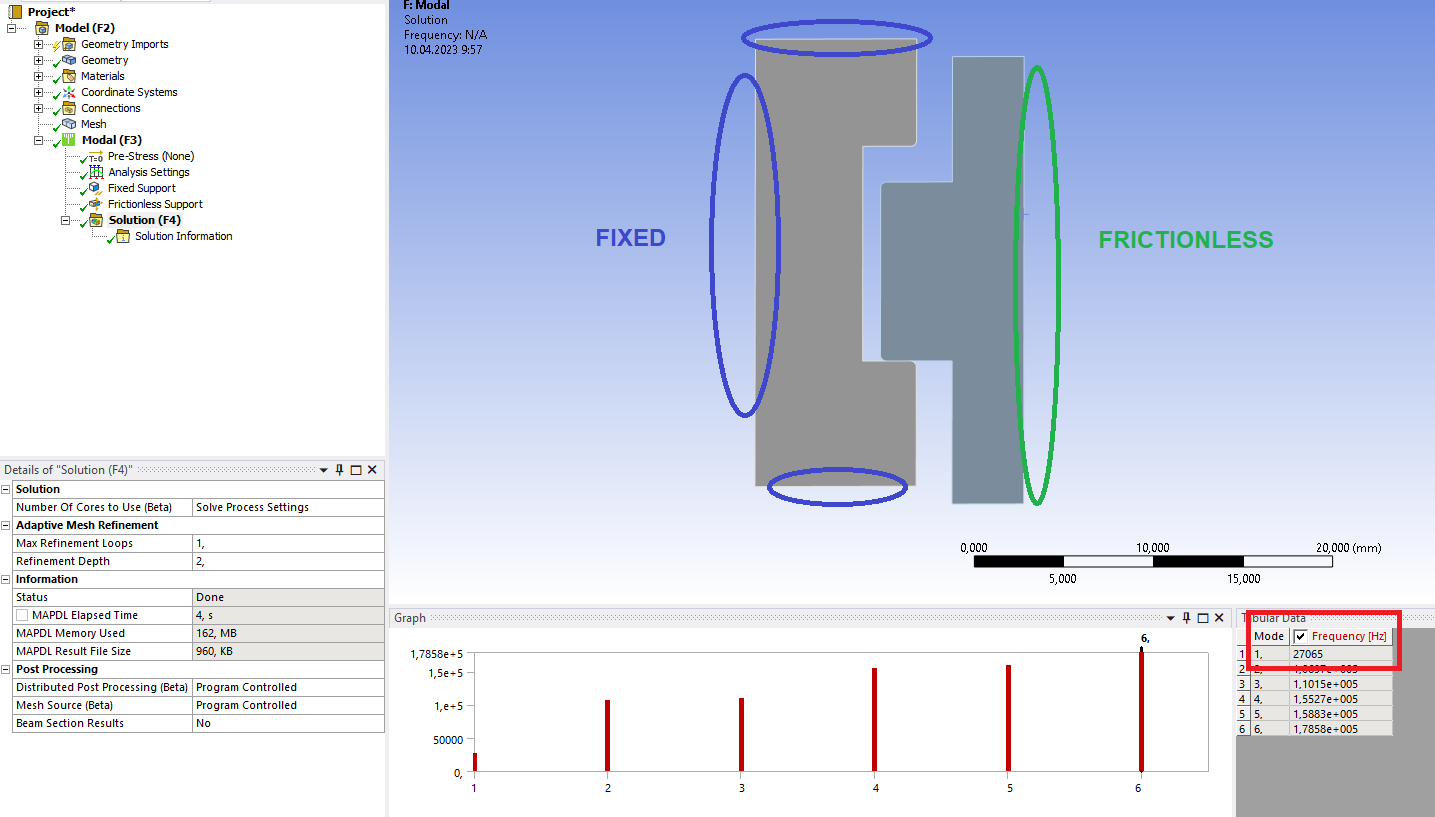
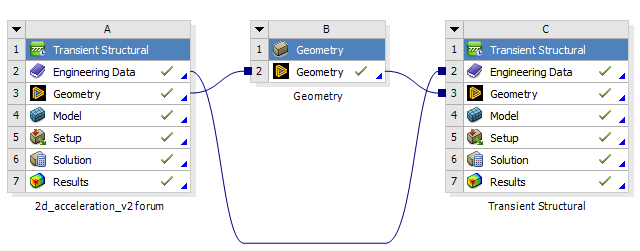
It is useful to know the first mode from a Modal analysis, which is 33683 Hz when the part is in contact.
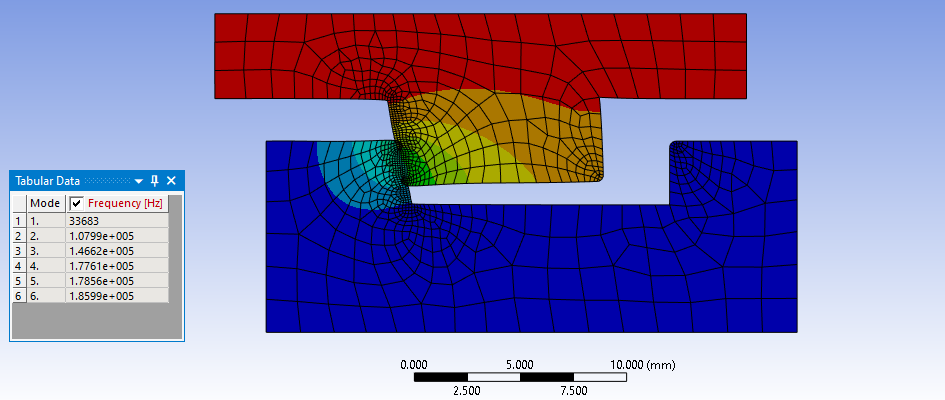
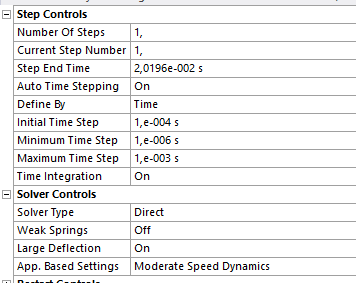
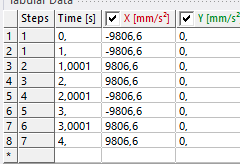
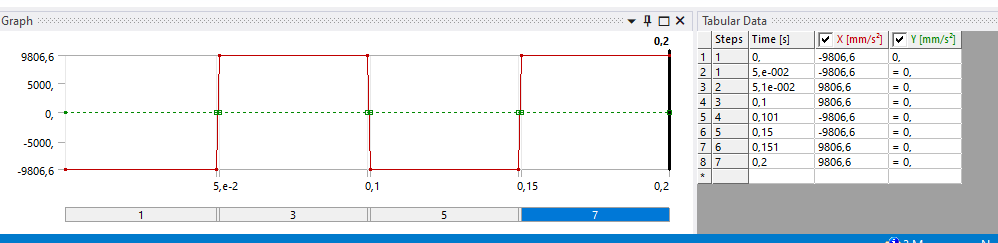
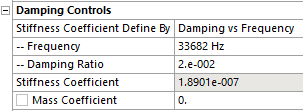
That helps you to calculate a time increment and damping. The period for 33683 Hz is about 3e-5 s, which is for a full cycle. You want at least 20 time points over that period, so 1.5e-6 is a good Initial and Maximum Time Increment for Transient Structural. I used the values below.

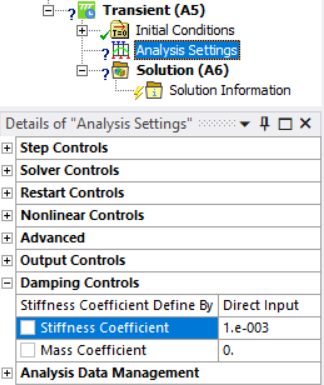
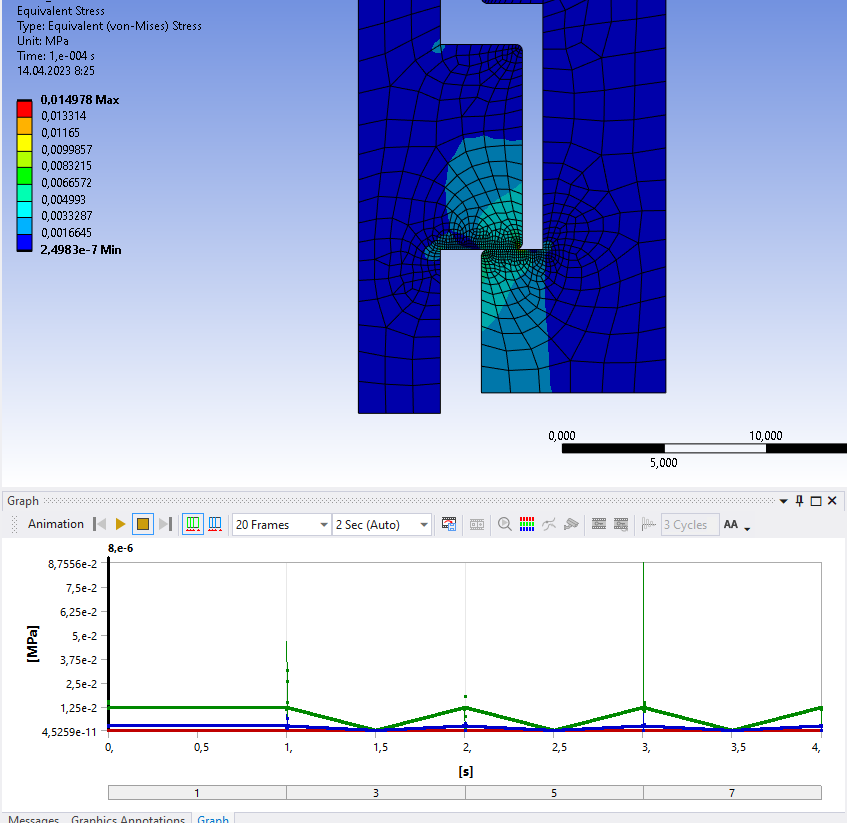
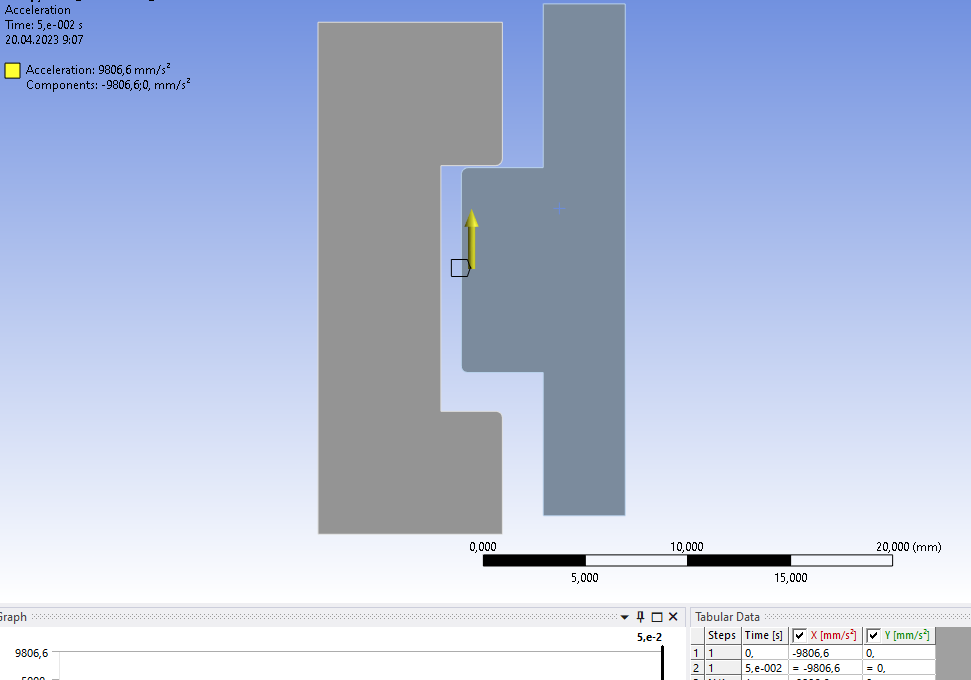
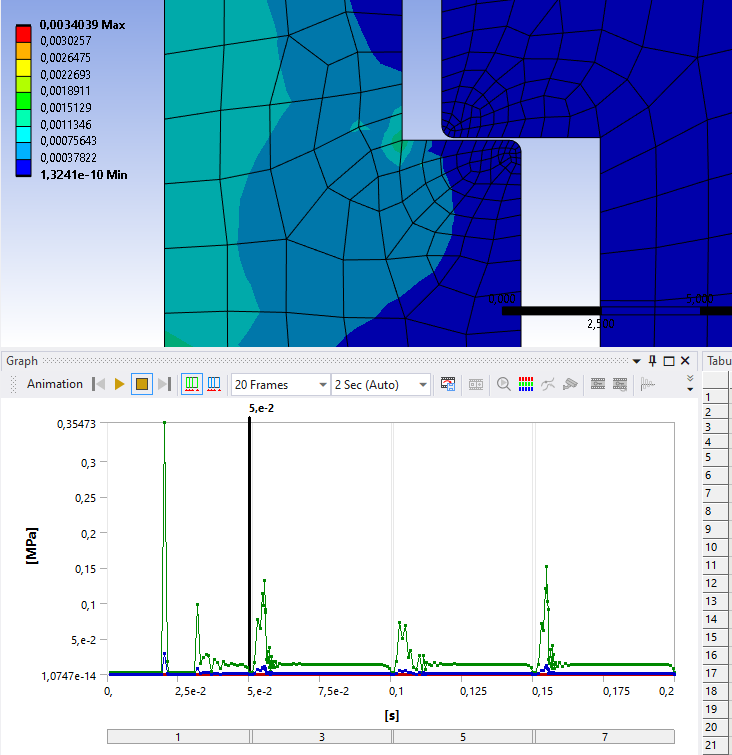
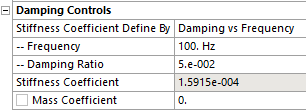
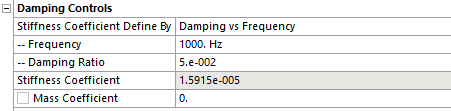
Use a Damping by Frequency input of 2% at this frequency.
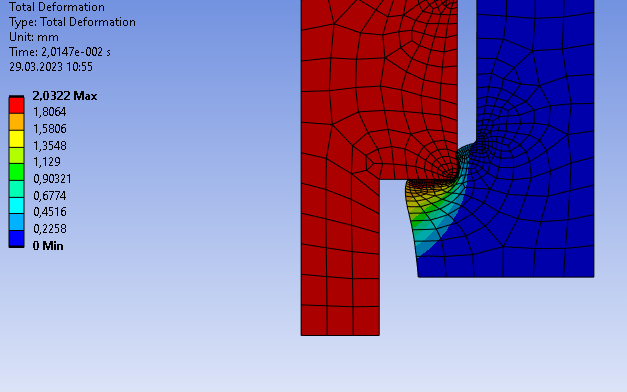
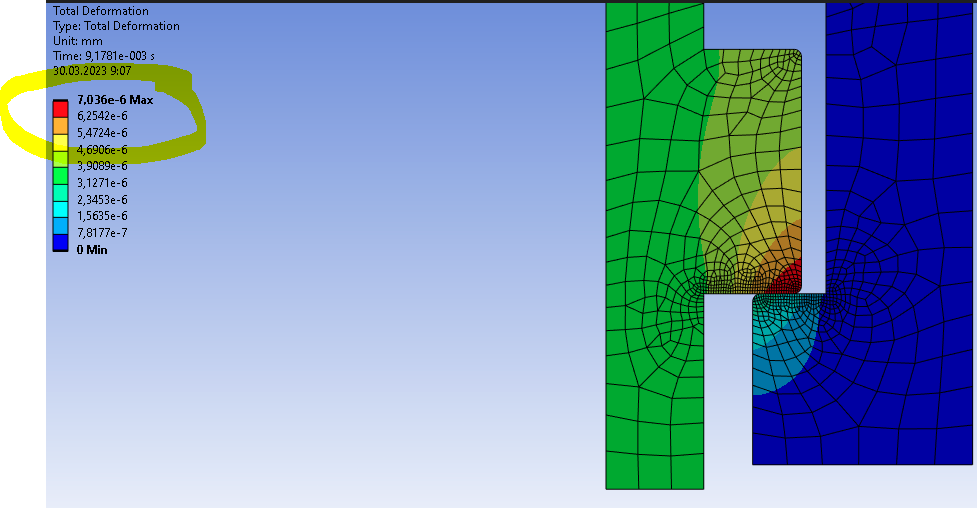
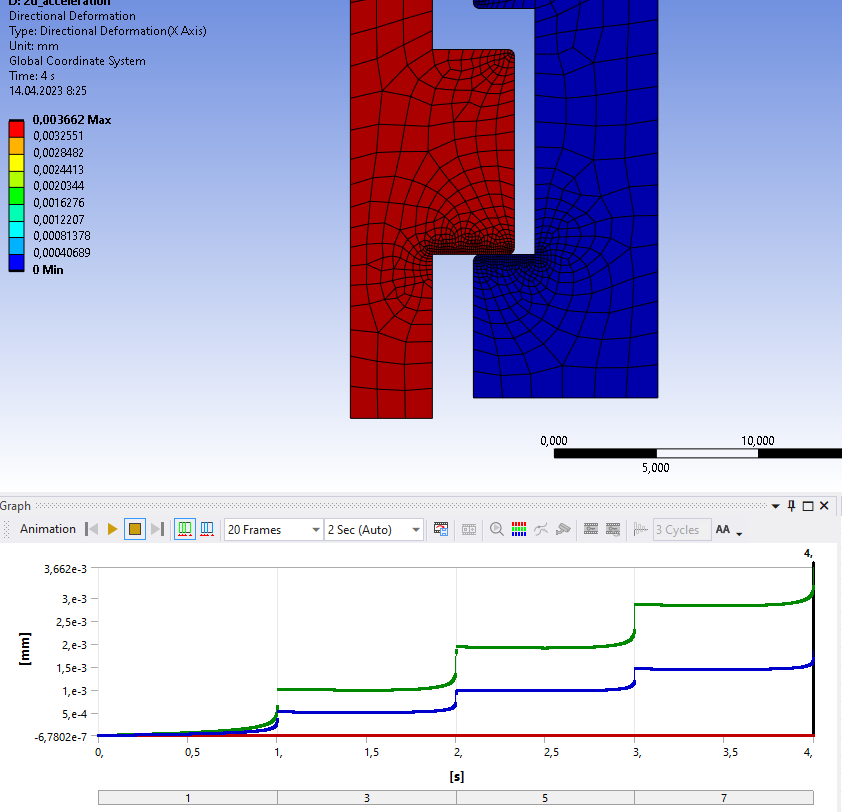
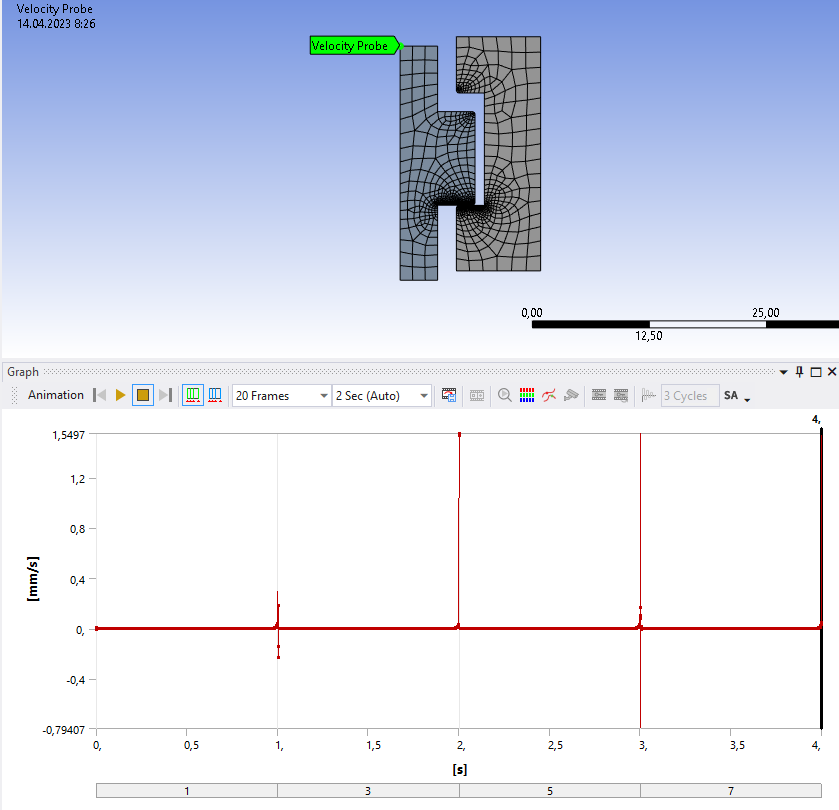
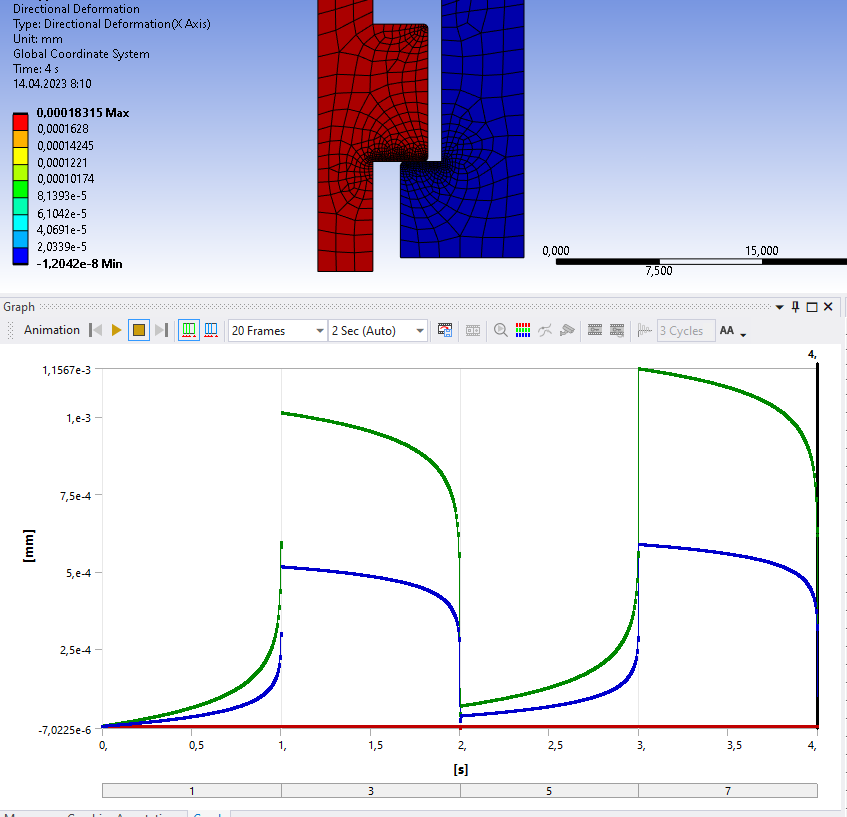
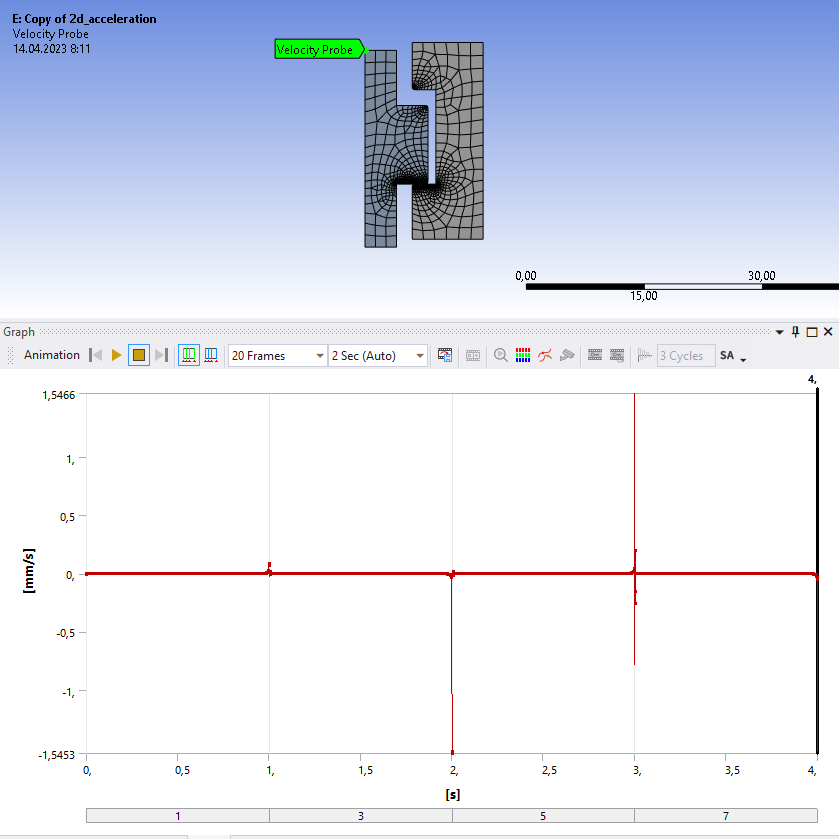
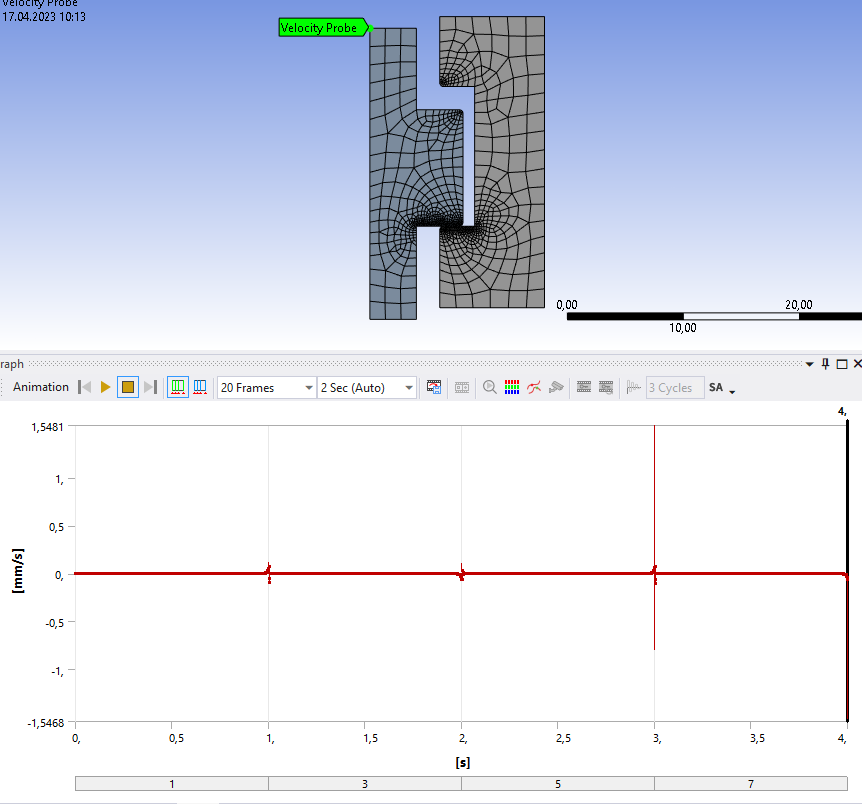
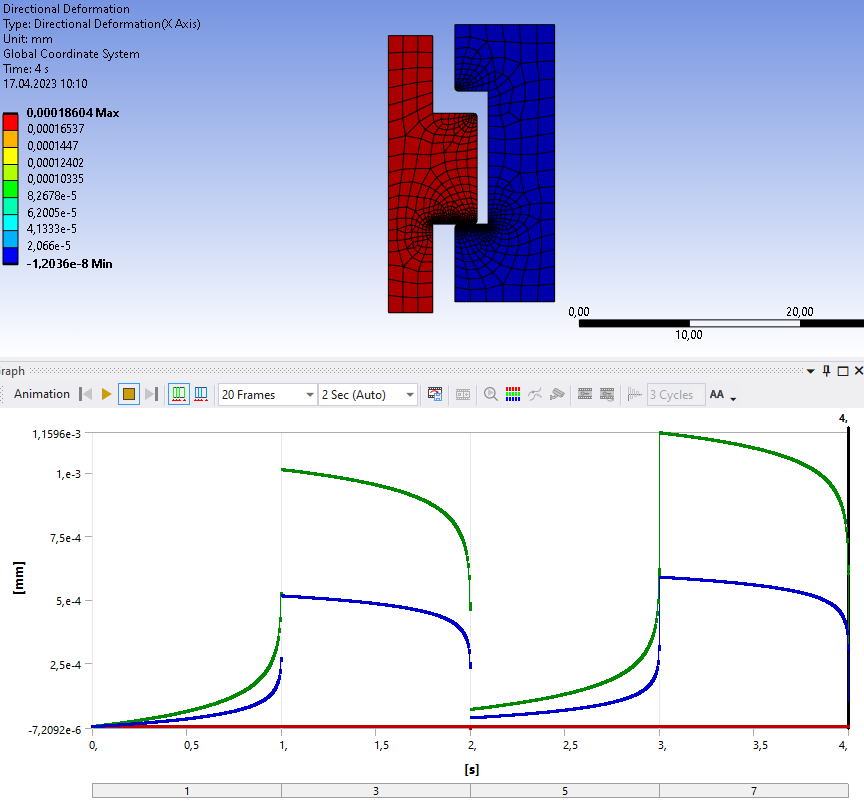
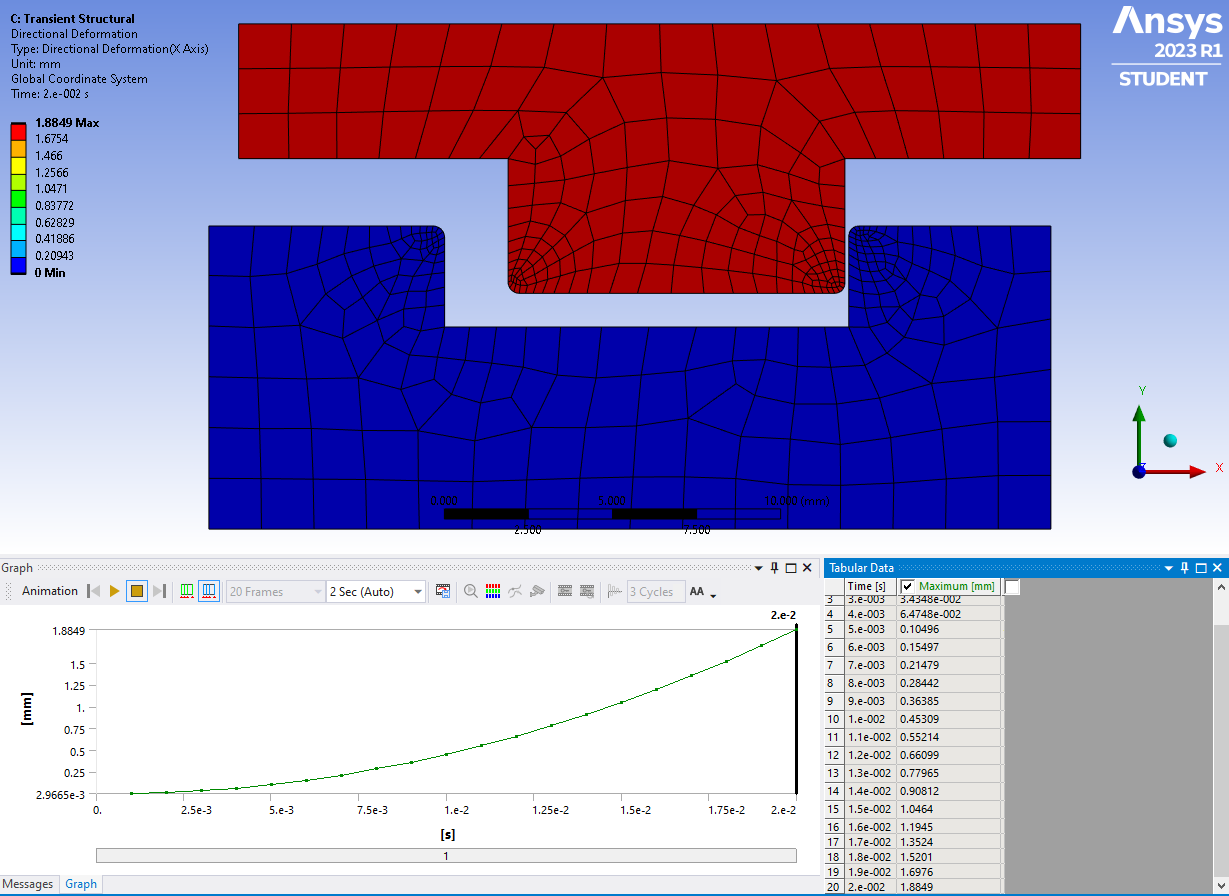
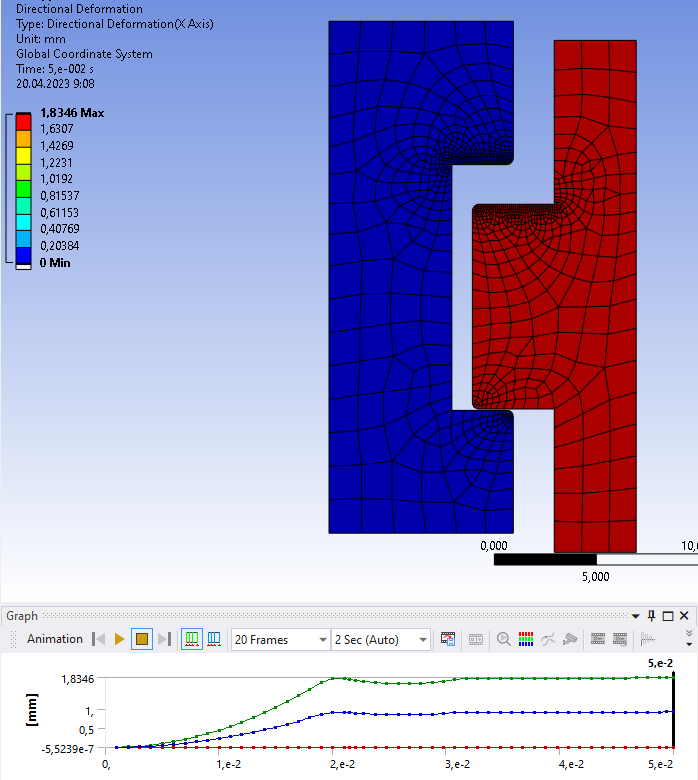
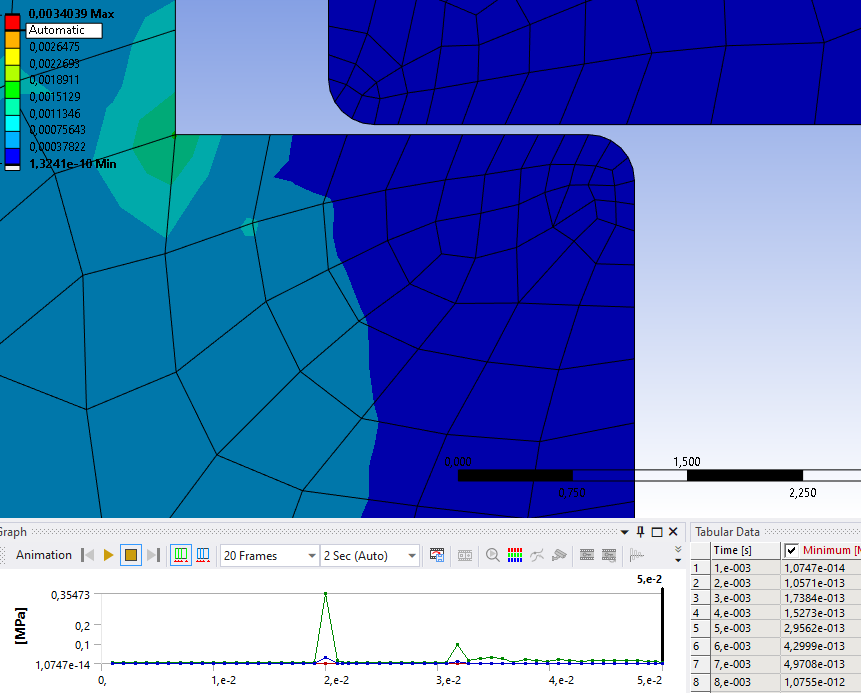
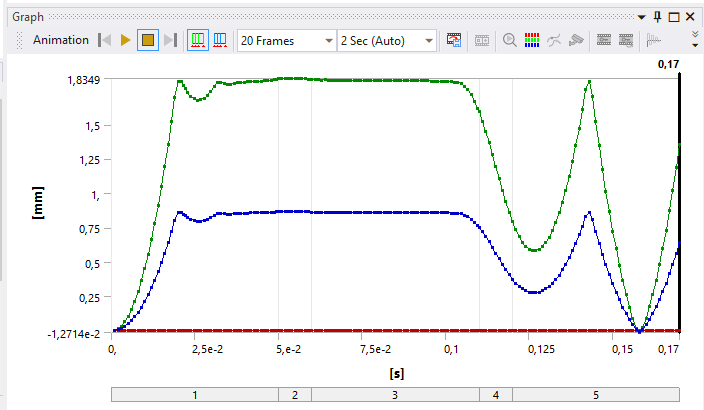
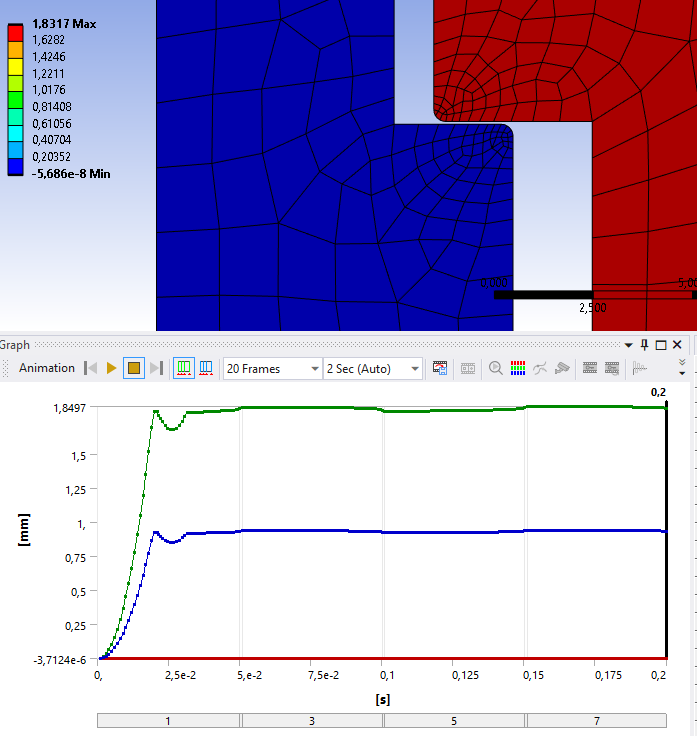
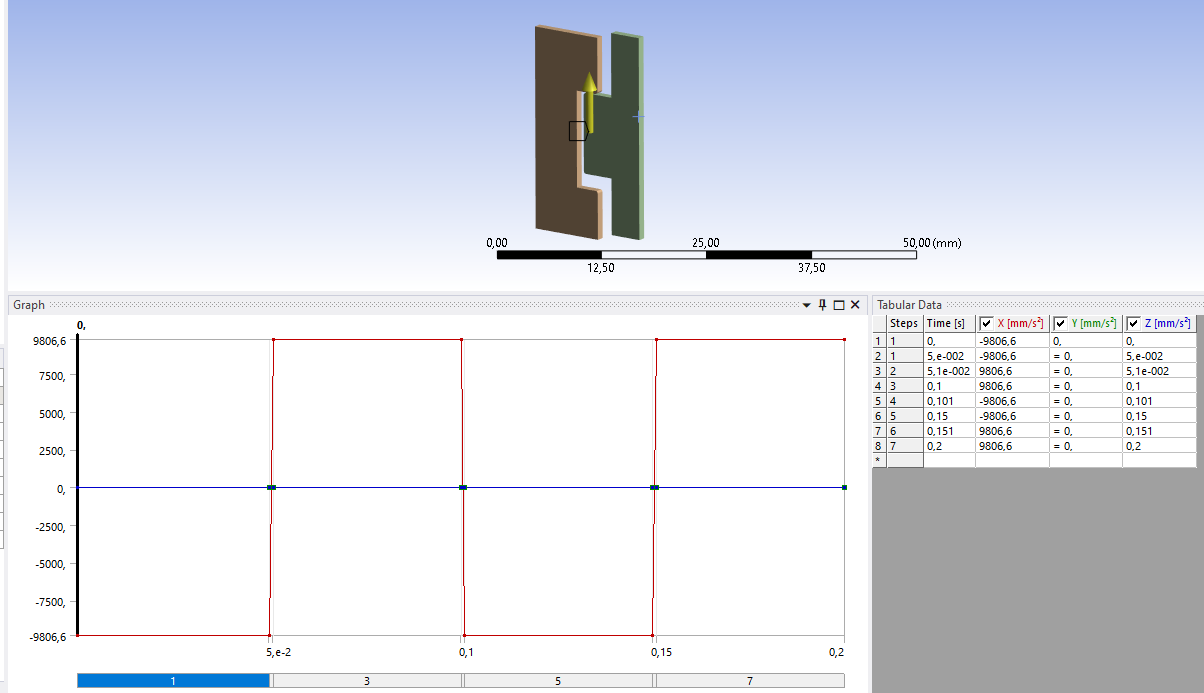
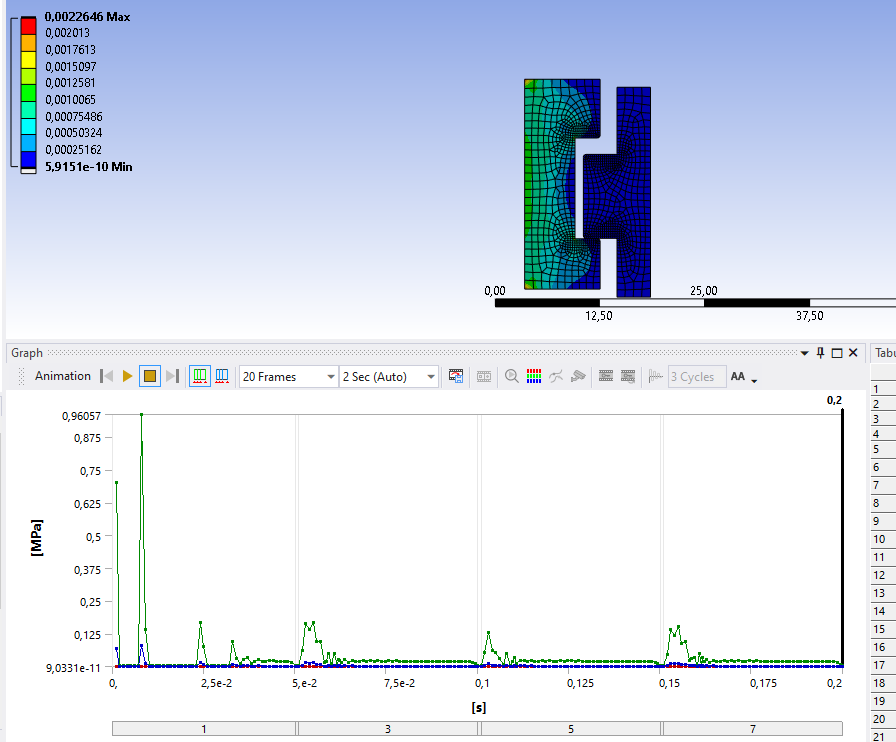
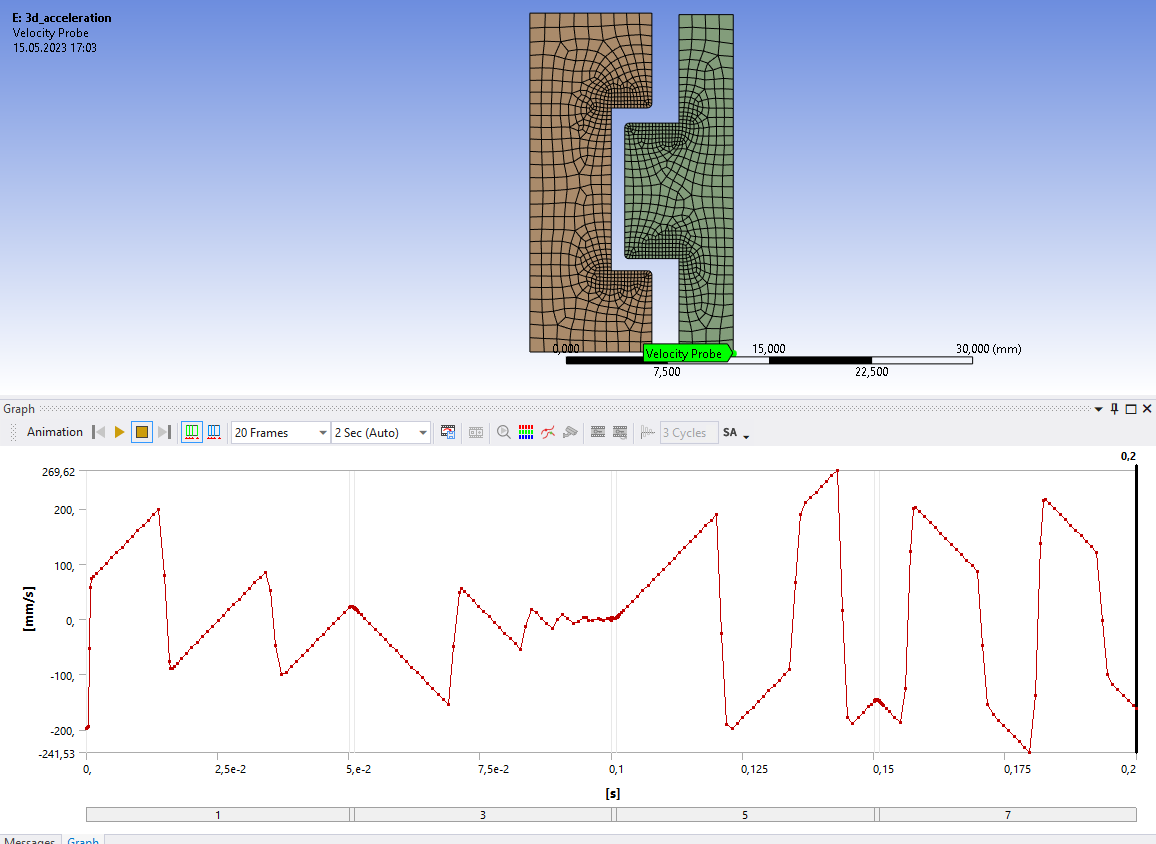
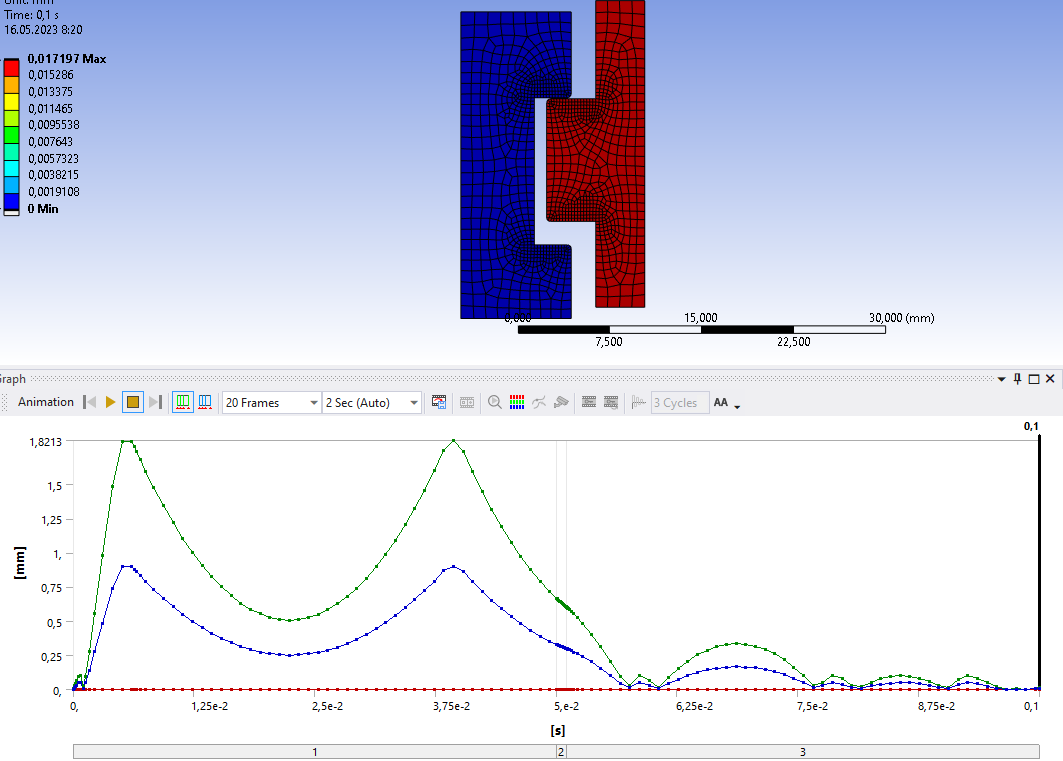
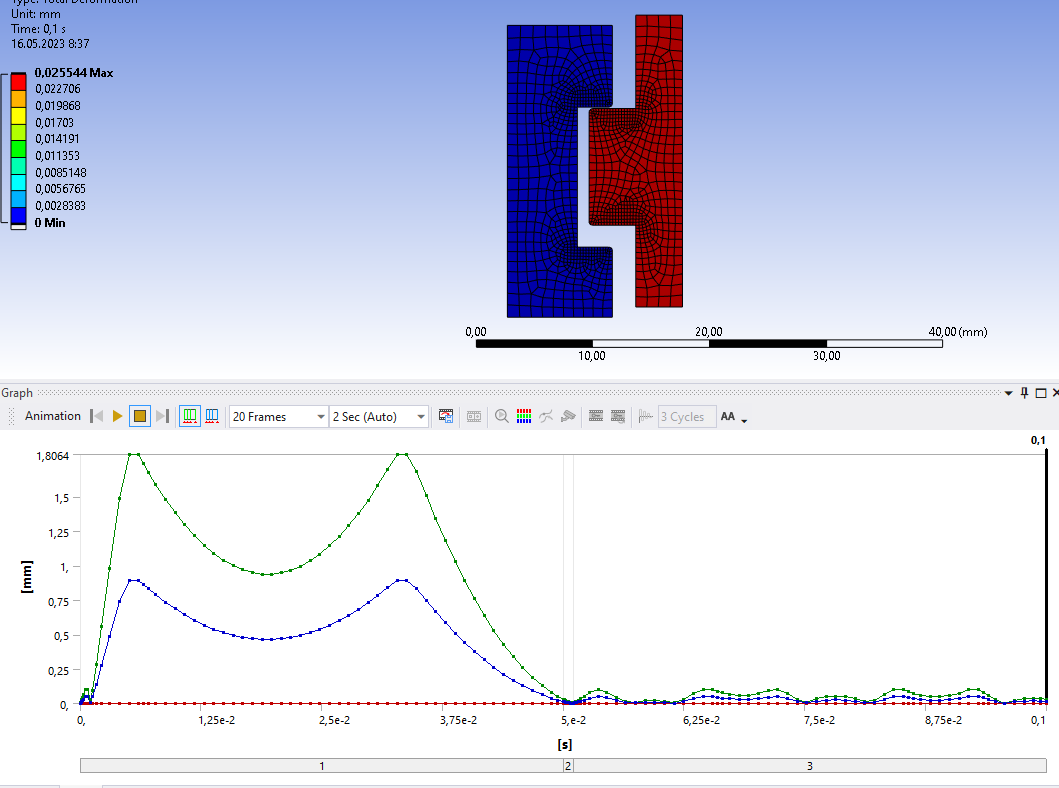
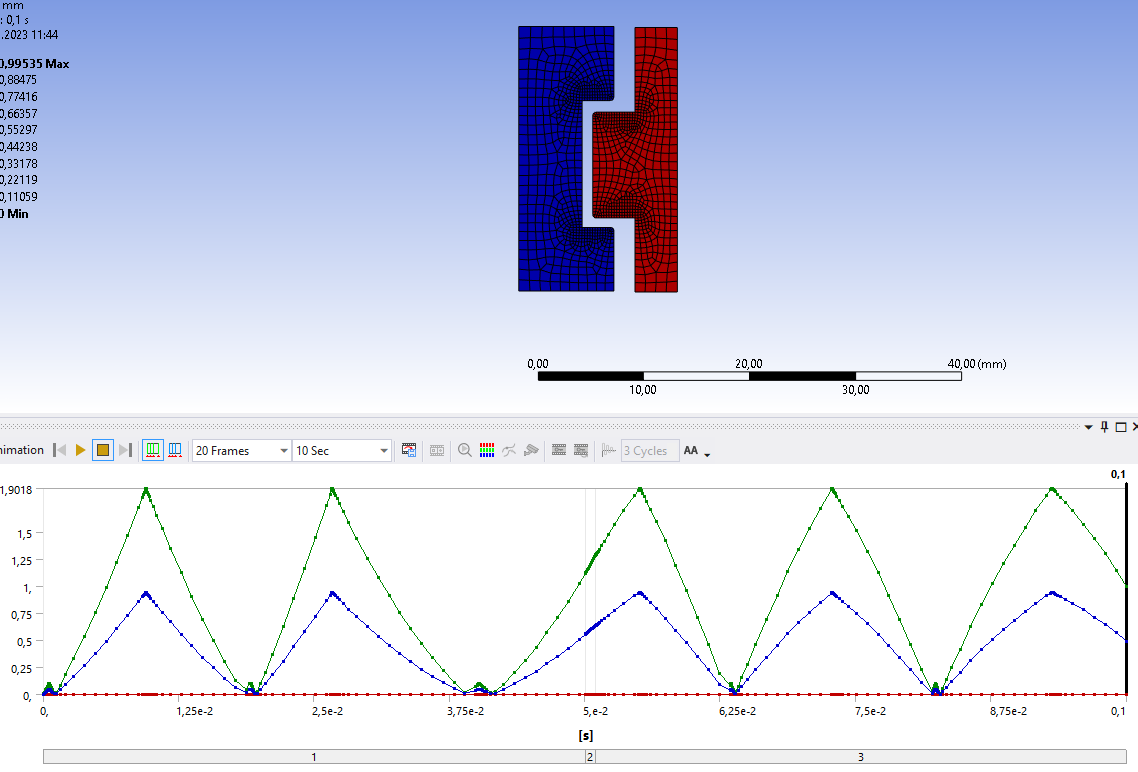
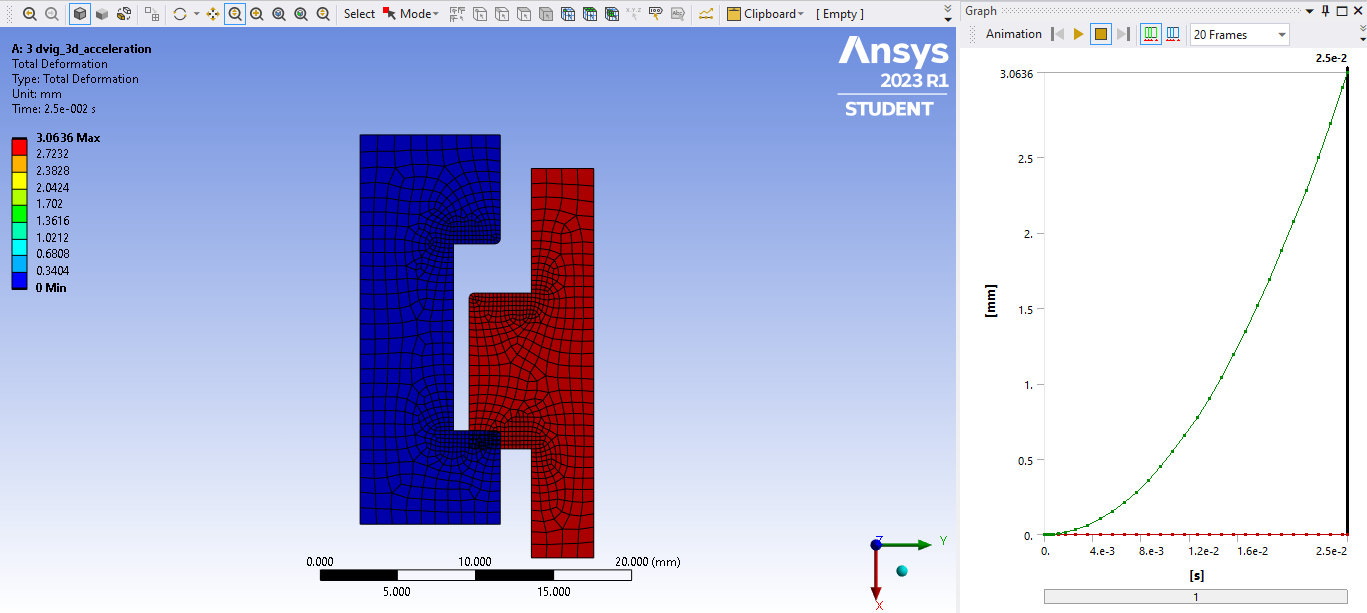
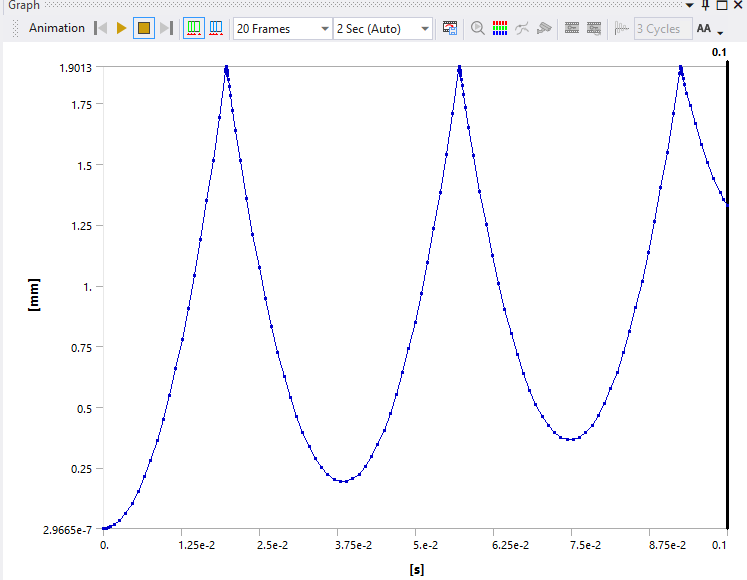
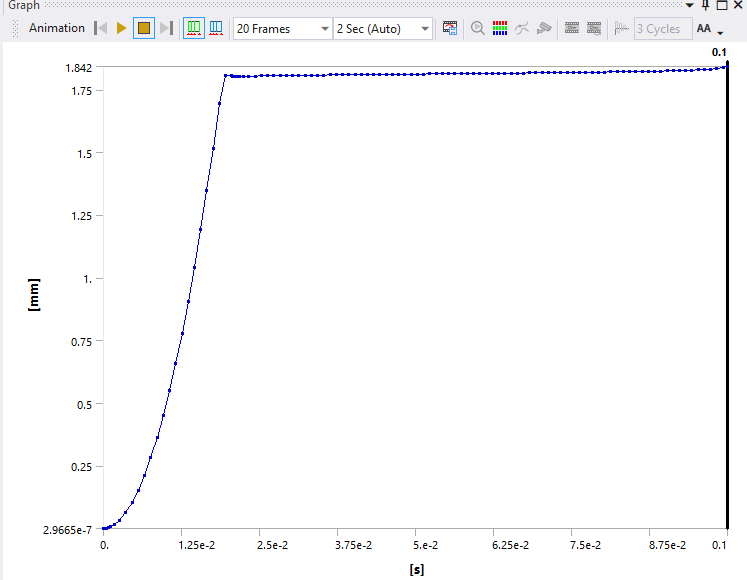
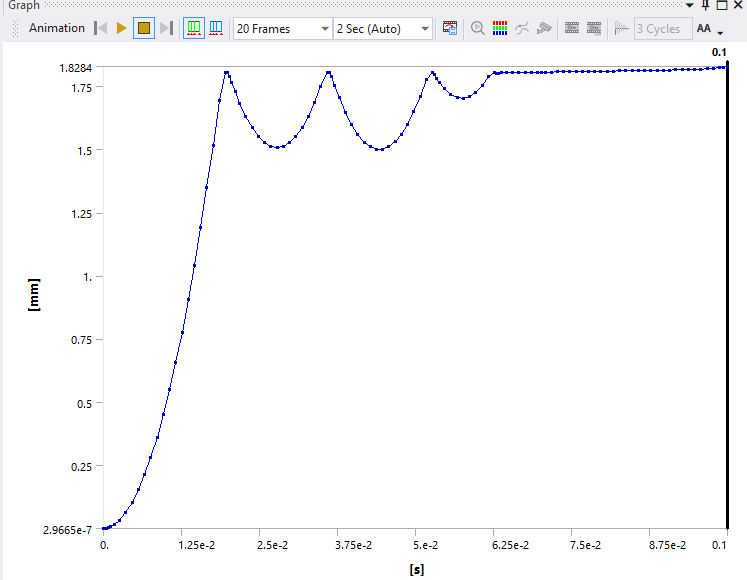
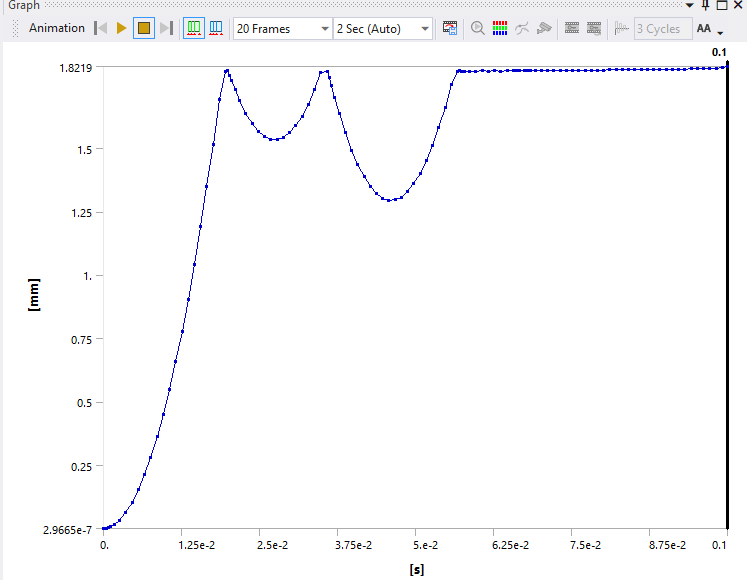
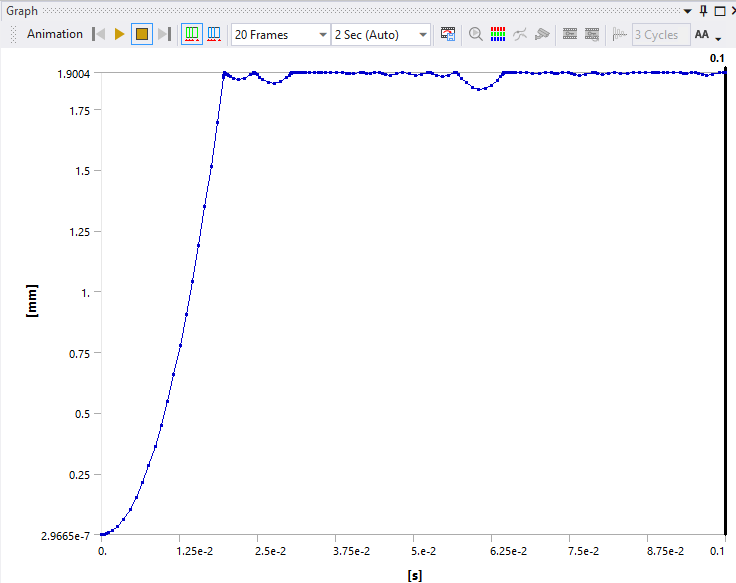
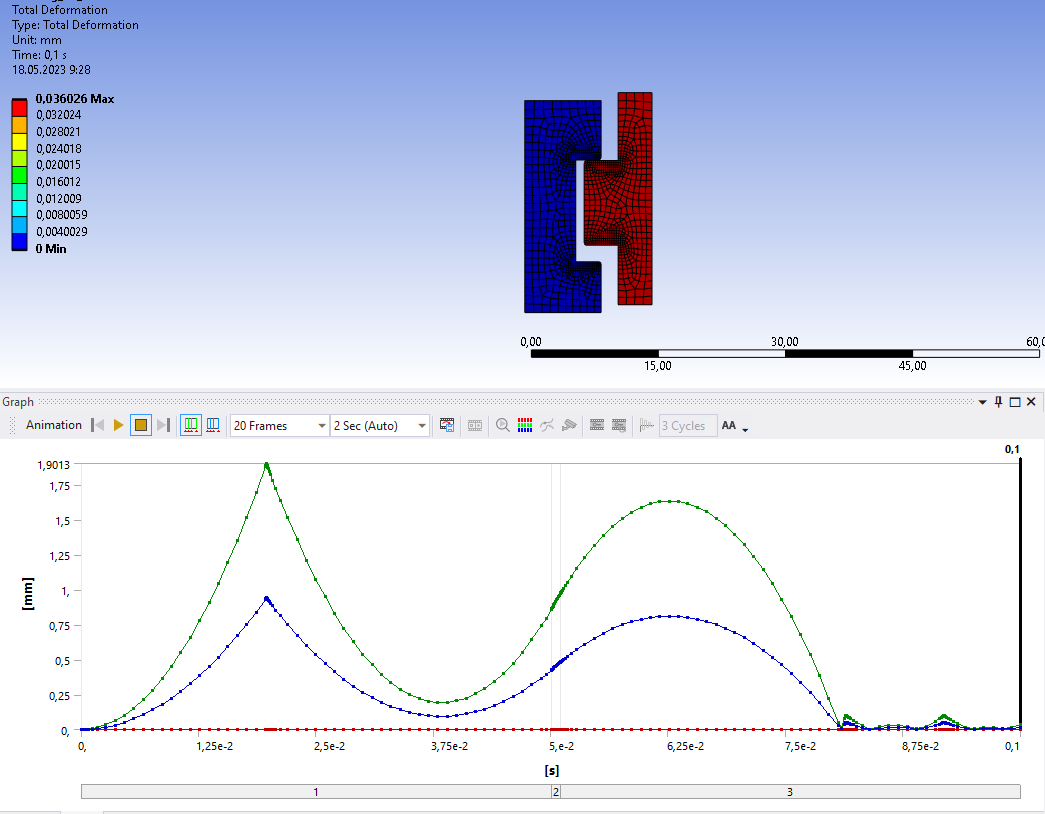
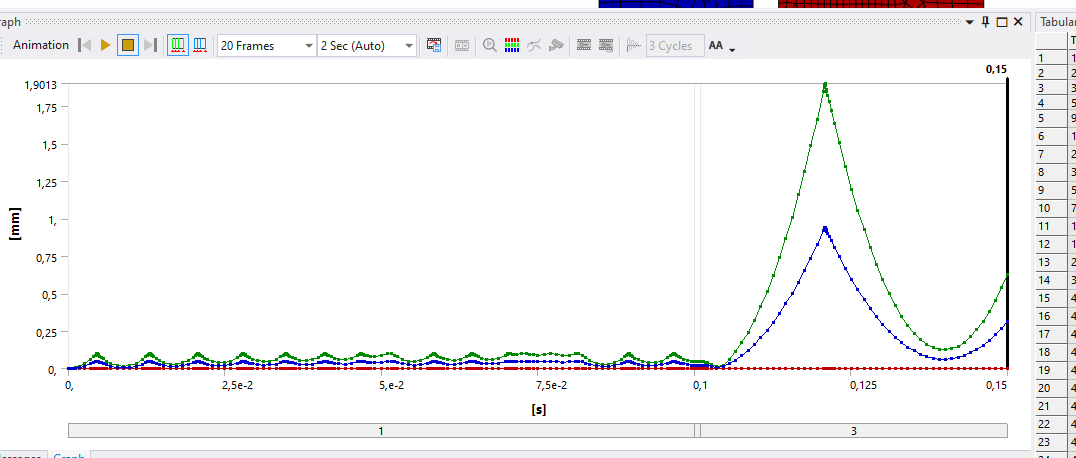
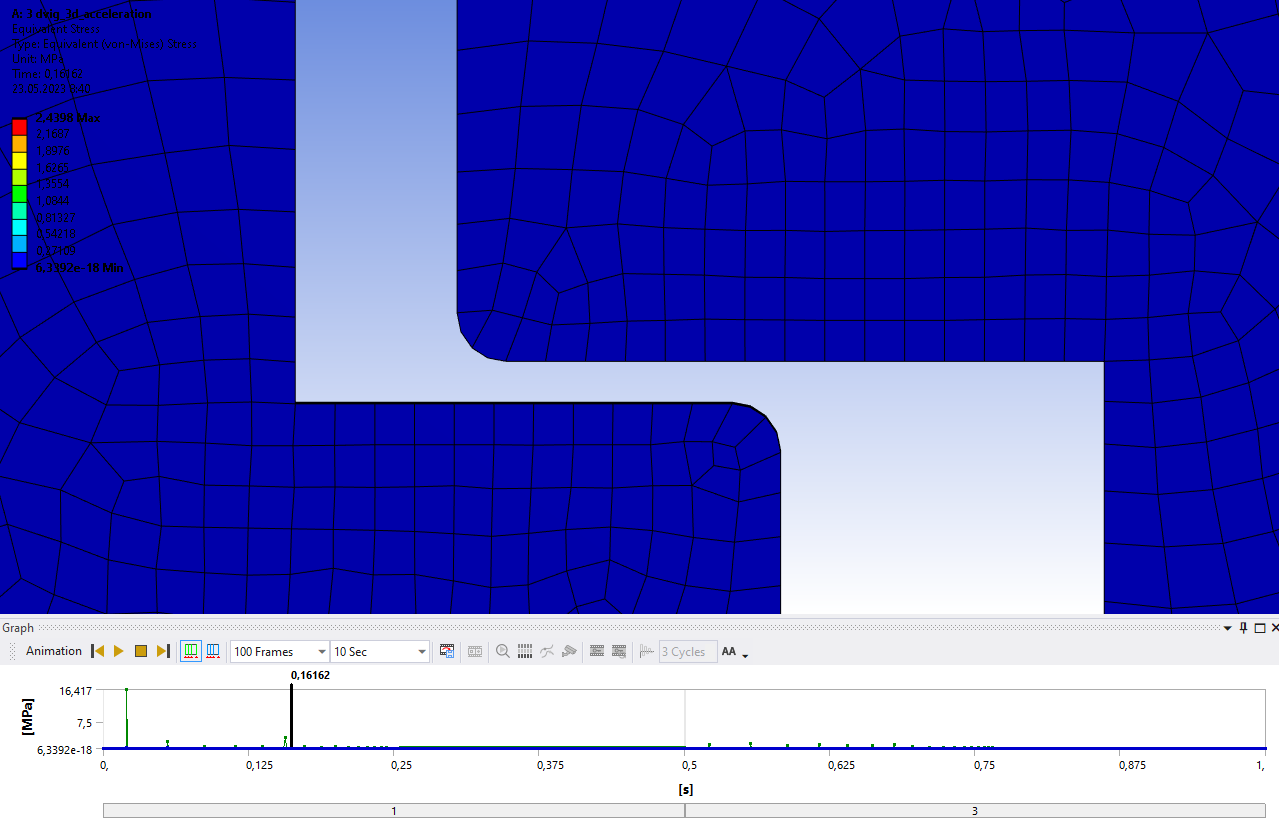
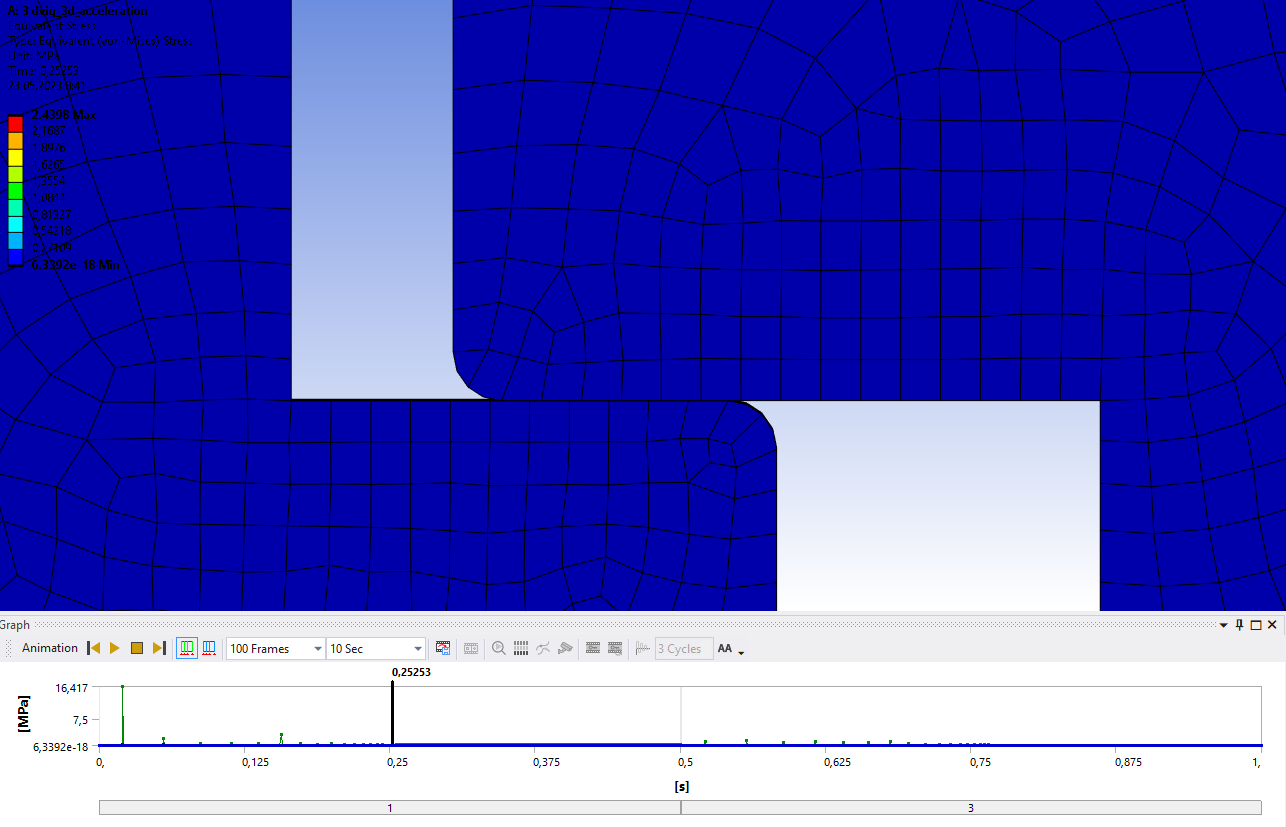
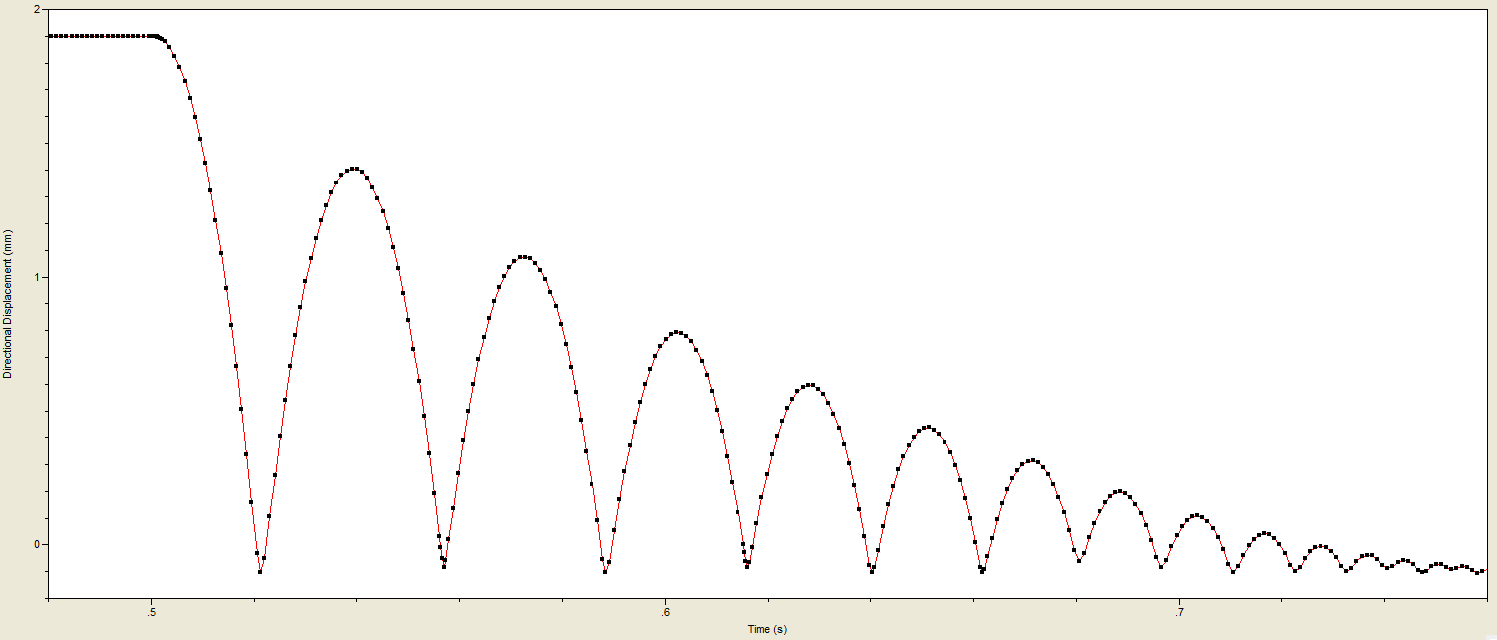
Put a Directional Deformation and a Directional Velocity plot in the X direction on a corner vertex of the moving part, distant from the contact surface. Here we see the damping working on the part.
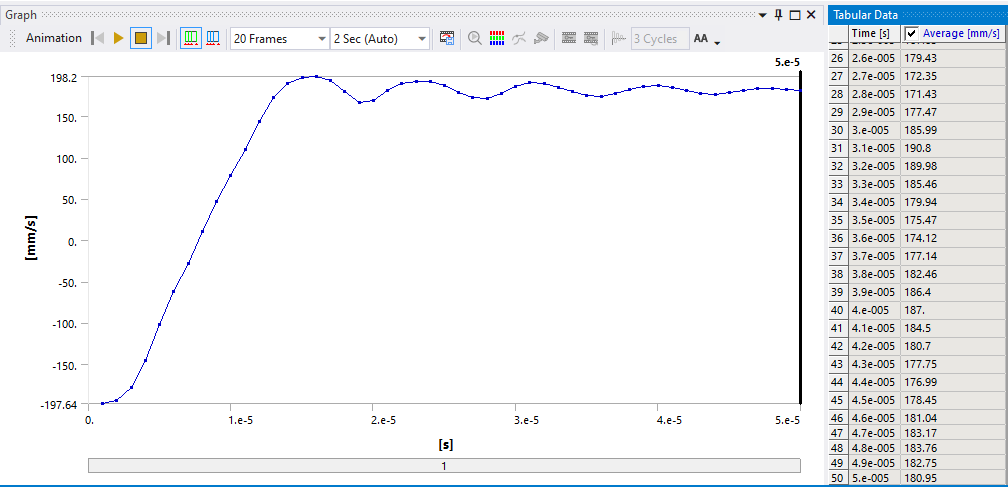
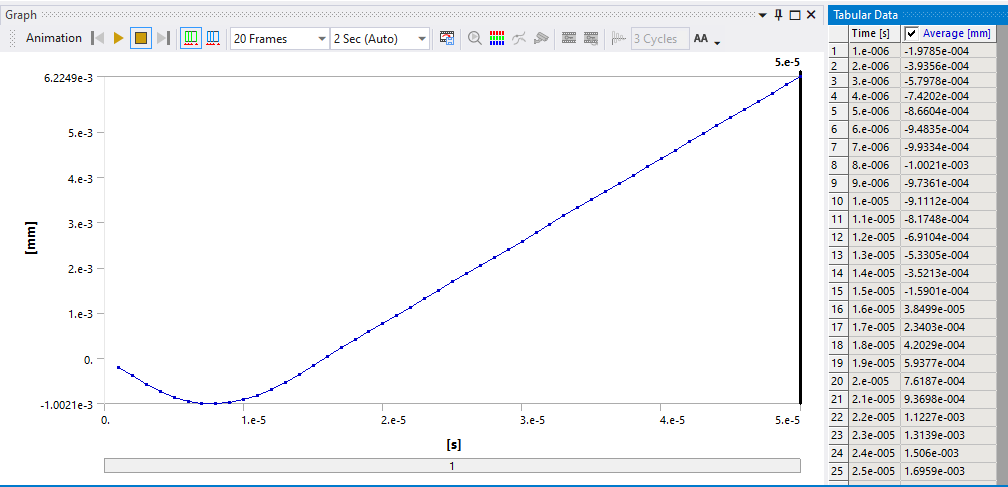
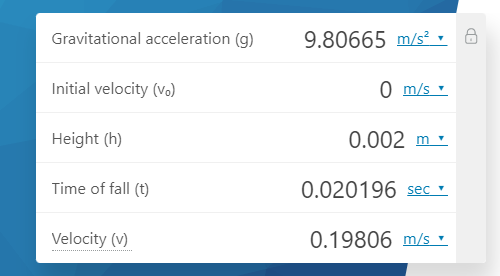
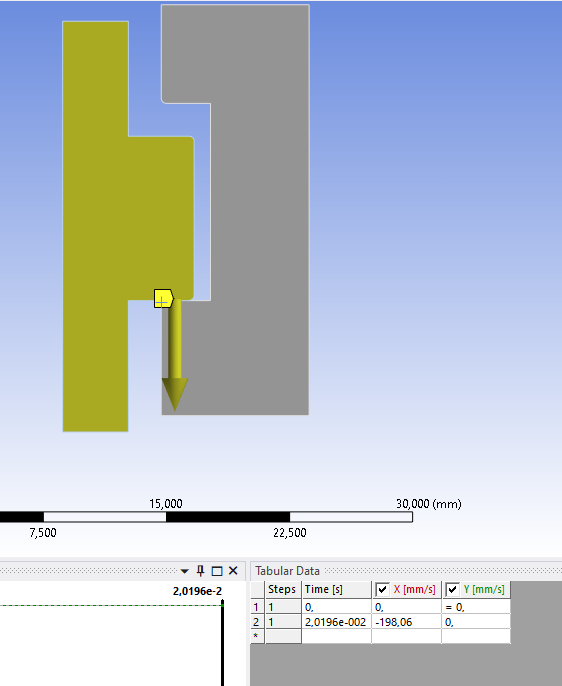
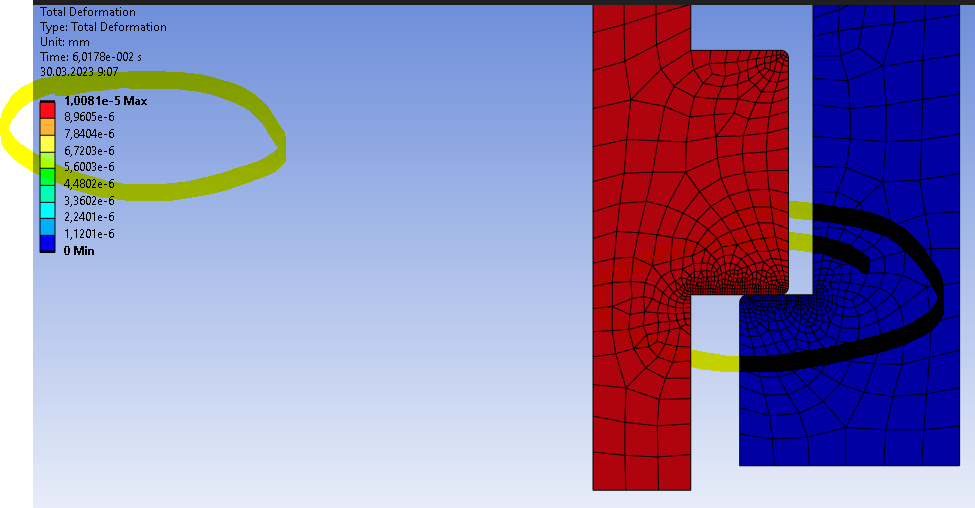
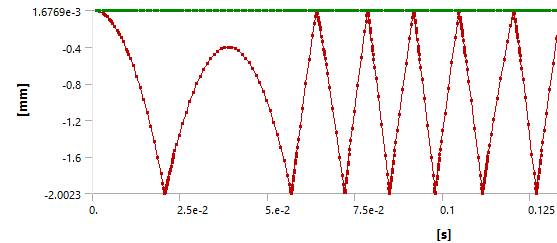
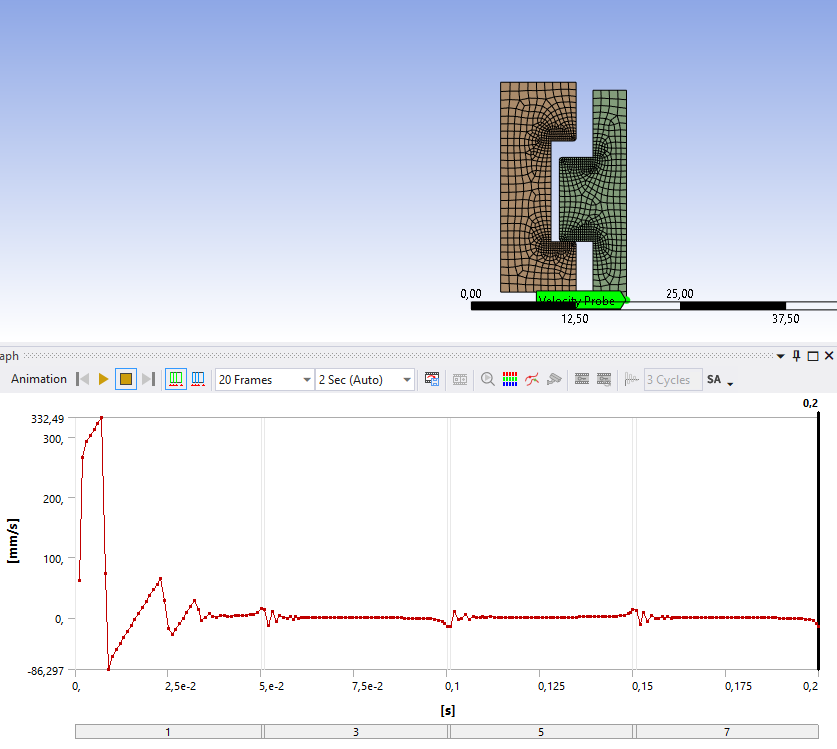
You can see that at t=1.6e-5 s the bounce is finished and the contact starts to separate, moving away at about 181 mm/s. The other end of the slot is 2 mm away. This is where the free fall began and gave the 198 mm/s initial velocity at impact. Since the departing velocity from the impact is only 181 mm/s due to damping and frictional contact losses, the part would not reach a 2 mm displacement if Gravity in the -X direction was included in the simulation. Gravity was not in the model, but including it makes an insignificant change during the 1.6e-5 s of the impact event.
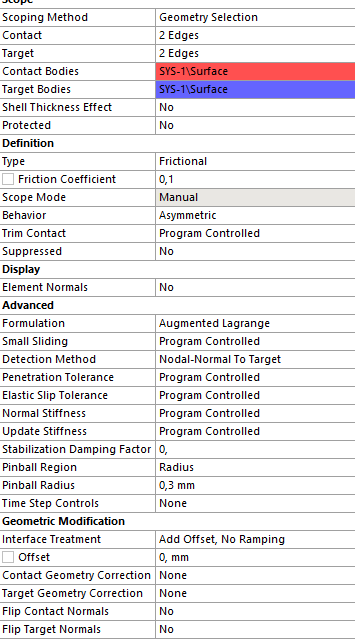
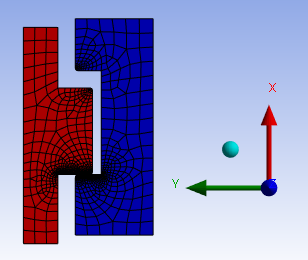
If there was no friction in the support of the moving part, it would make a second impact at 181 mm/s instead of 198 mm/s for the first impact. In reality, there is likely to be friction both going up and falling down. This is a 2D simulation so there is no motion out of plane. In a 3D simulation the bounce would not travel perfectly along the X axis, but would rotate and go off at some small angle so the second impact would not be perfectly level with the surface, dissapiting more energy than the first impact.
 This topic has been answered!!
This topic has been answered!!