I am trying to run a transient structural analysis to simulate the interaction between a mask and a face. However, the mask just keeps going through the face without contacting it. All meshes are hex mesh. The face is defined as linear elastic cheek skin with E = 31 kPa, v = 0.49. The mask cushion that contacts the face is linear elastic with E = 151 kPa, v = 0.47. The mask shell is ANSYS Granta Polycarbonate Plastic. The mask geometry is offset from the face by 5 mm, done in SpaceClaim.
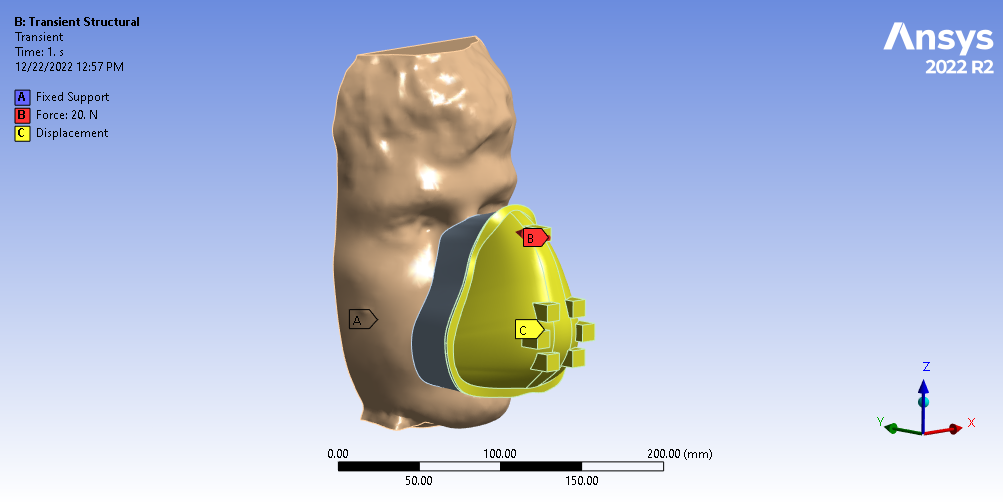
The boundary conditions are a fixed support at the back of the head, a displacement boundary condition that only allows displacement in the y axis, and a force condition of 20 N in the y direction applied on 3 nodes of the mask: the top and the two sides.
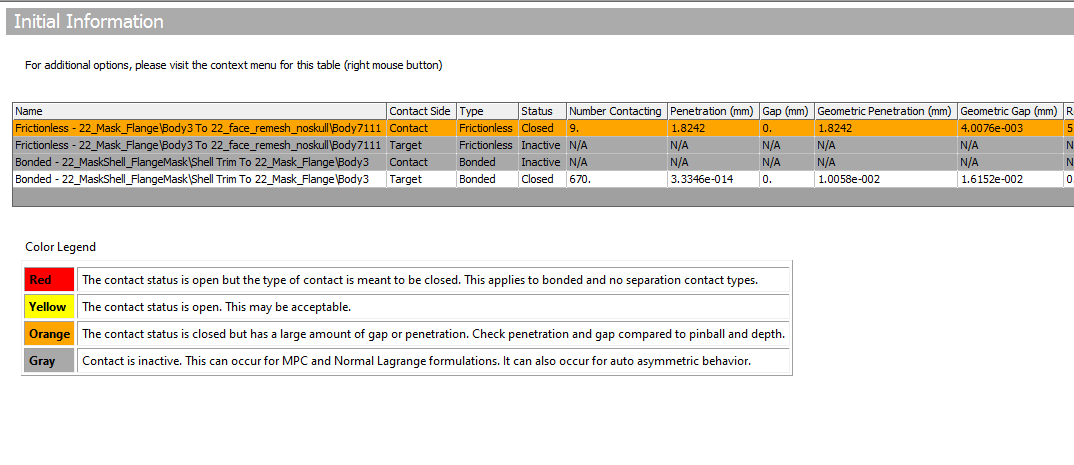
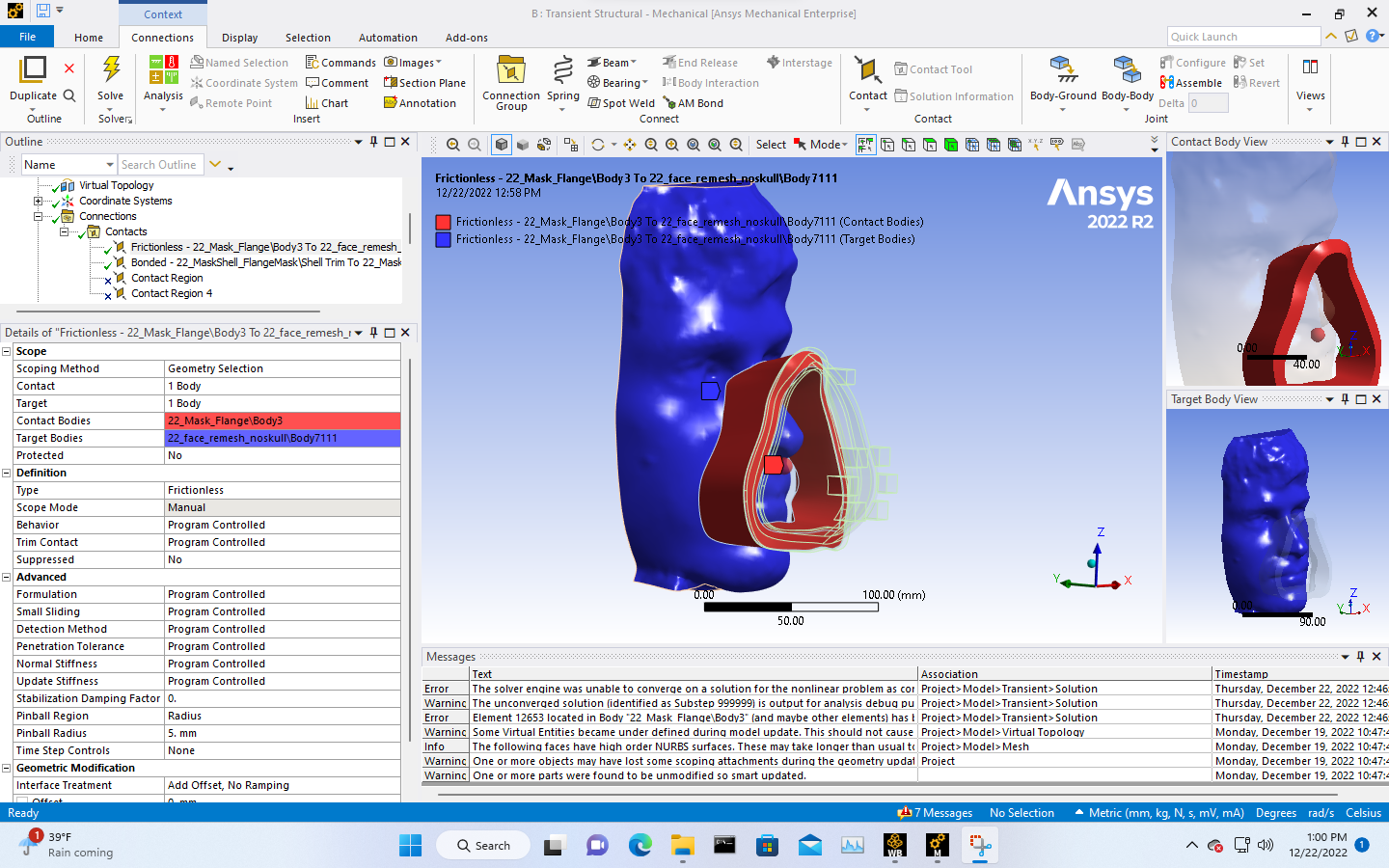
The contact between face and mask cushion is frictionless. The mask cushion and mask shell are bonded. I tried adding a pinball radius of 5 mm to the frictionless contact but that hasn't helped.
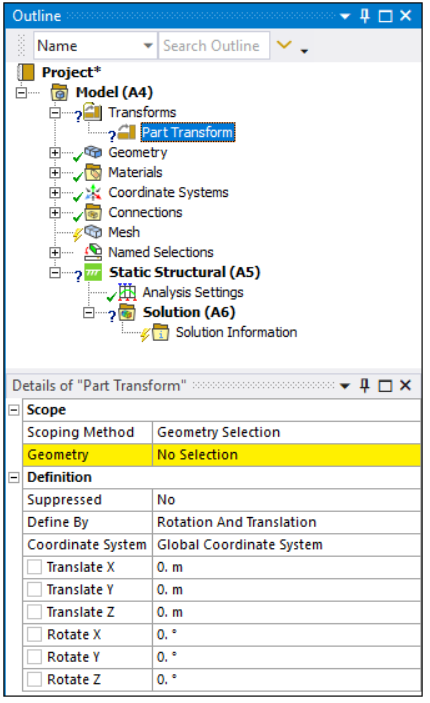
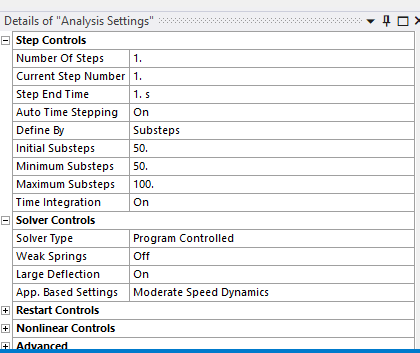
I have run it with the following analysis settings.
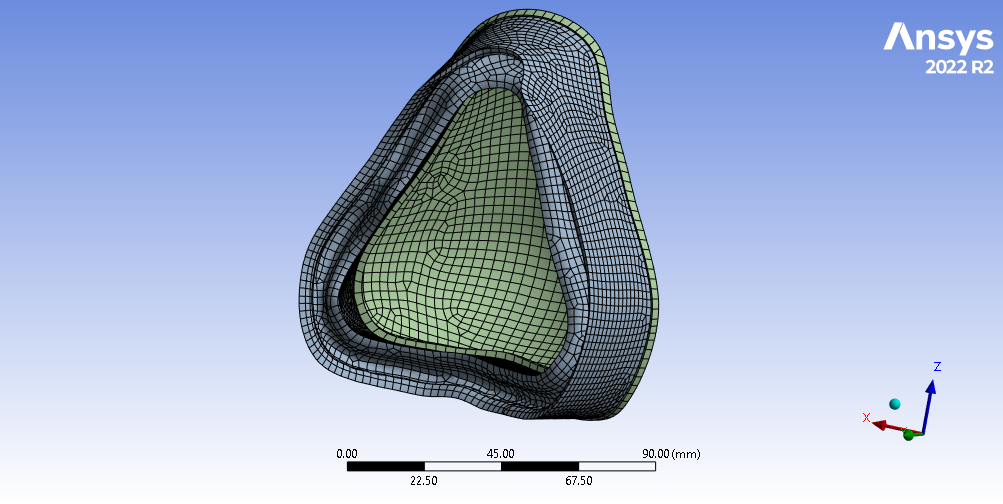
Here is an additional picture of the mask for reference.
Any help would be greatly appreciated. Thank you!