Introduction to Servo Motor Controller — Lesson 1
The most common controlling technique for servo motors is Pulse-Width Modulation (PWM), in which the duration of each pulse is modified to correspond to a specific rotational position. The PWM is the output for the given input by the user, which in this case is a coefficient and the period of the pulses defined through the number of cycles. Here’s how the output pulse will look along with the current angular position in the graphics and the input variables used:
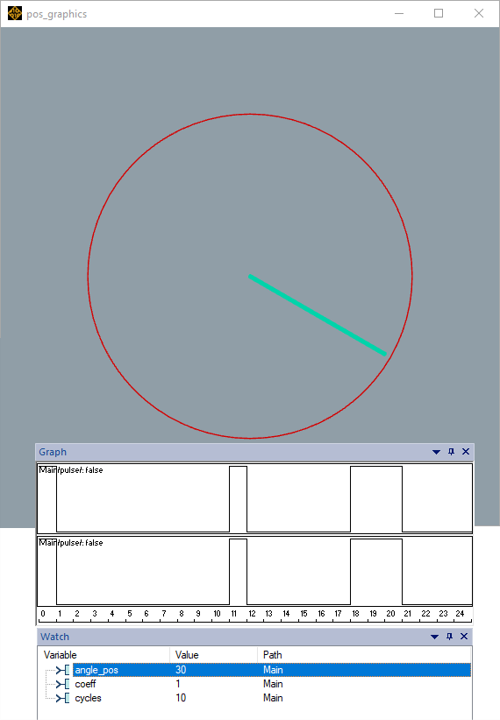
Fig 1 Output Pulse
We will use one package with three operators in Ansys SCADE software to achieve this. One operator handles the conversion from the angular position provided by the user to the number of cycles of the pulse. The second operator is a state machine which handles the control. The third and main operator contains and connects the other two.
You are being redirected to our marketplace website to provide you an optimal buying experience. Please refer to our FAQ page for more details. Click the button below to proceed further.