Hello Andres, you can use Constrained_joint_COOR_Revolute or Constrained_Joint_COOR_Spherical to do something like this.
The basic method for how this works is
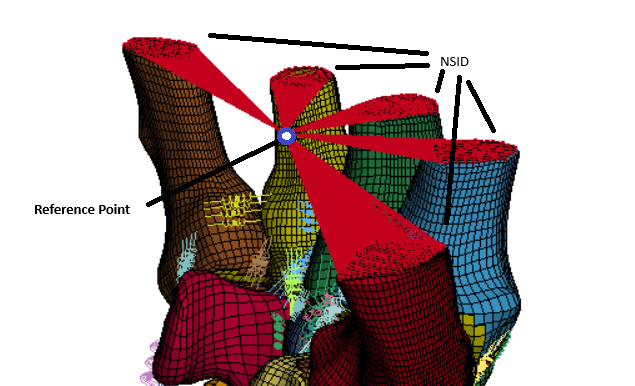
1) define 2 CNRBs (constrained nodal rigid body), each with a unique ID 80001 and 80002 in below example, 90001 and 90002 are the node set IDs which the CNRB is “tied to”.
2) define several pairs of coordiante (x,y,z) locations following the specific requirements of the joints. You want to find these coordinates as outlined in the video in the bottom of the comment. I’ve not made a video about the simpler joints but it’s the same idea for all 11 joint types in my video. the youtube video should show the basic thought process and the documentation shows you what's required.
3) use the joint keyword above to tie the 2 CNRB together based on
*CONSTRAINED_NODAL_RIGID_BODY
$ pid cid nsid pnode iprt drflag rrflag unused1
80001 0 90001 0 1 0 0
*CONSTRAINED_NODAL_RIGID_BODY
$ pid cid nsid pnode iprt drflag rrflag unused1
80002 0 90002 0 1 0 0
*CONSTRAINED_JOINT_COOR_REVOLUTE_ID
$# jid title
0
$# rbid_a rbid_b rps damp tmass rmass
80001 80002 1.0 0.0 0.0 0.0
$# x1 y1 z1
-9.525 12.7 -12.7
$# x2 y2 z2
-9.525 12.7 -12.7
$# x3 y3 z3
3.175 12.7 -12.7
$# x4 y4 z4
3.175 12.7 -12.7
$# x5 y5 z5
0.0 0.0 0.0
$# x6 y6 z6
0.0 0.0 0.0